 лучшие Инженеры
лучшие Инженеры топ Закачек
топ Закачек топ Просмотров
топ Просмотров топ За месяц
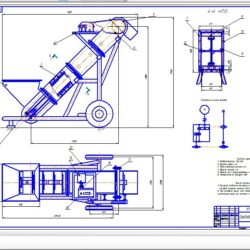
топ За месяцСпроектировать передачу зубчатую с вписанием в заданное межосевое расстояние
Состоит из 5 листов.
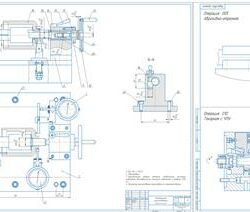
1 лист (структурный анализ механизма)
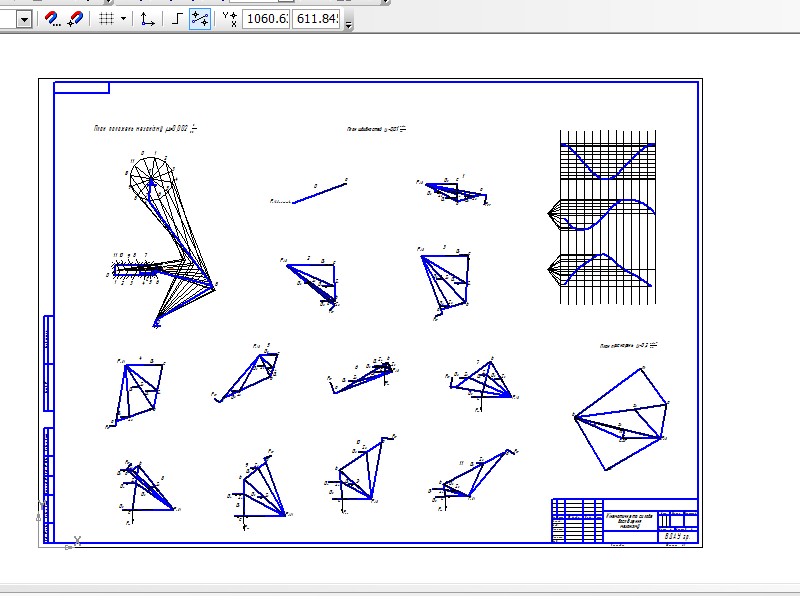
2 лист (Кинетостатичне исследования механизма)
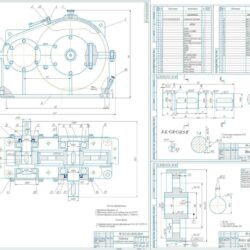
3 лист (расчет маховика)
4 лист (Синтез кулачкового механизма)
5 лист (Синтез зубчатого сцепления)
Задача.
Спроектувати передачу зубчасту з вписуванням в задану між осьову ві-дстань.
Вихідні дані:
а*=94 мм міжосьова відстань;
мм модуль;
число зубців першого колеса;
число зубців другого колеса;
коефіцієнт висоти головки зубця;
коефіцієнт висоти ніжки зубця;
коефіцієнт радіального зазору;
коефіцієнт округлення біля ніжки зубця;
кут профілю.
Зміст
Завдання на курсовий проект……………………………………………...
1. Геометричний синтез зовнішнього евольвентного нерівнозміщеного прямозубого зачеплення (Лист 1) ……....................................…….............3
1.1 Визначення коефіцієнтів зміщення та визначення кута зачеплен-ня……….......................................................................................................3
1.2 Визначення геометричних параметрів зубчастого зачеплення…......….4
1.3 Перевірка розрахунків на ЕОМ……………………………………....…..6
1.4 Викреслювання елементів зубчастого зачеплення………………….......6
1.5 Визначення якісних показників зачеплення………………………...…..8
1.6 Синтез та кінематичний аналіз планетарного механізму……………...11
2. Кінематичне та силове дослідження шарнірно-важільного механізму ( Лист 2) ……....………........................................................................................17
2.1. Структурний аналіз механізму………………………………………...…17
2.2. Кінематичний синтез механізму………………………………………....19
2.3. Побудова планів механізму…………………………………………...….20
2.4. Побудова планів швидкостей………………………………………….....21
2.5. Побудова планів прискорень……………………………………………..26
2.6. Кінетостатичне дослідження механізму……………………………....…29
2.6.1. Визначення сили корисного опору…………………...……30
2.6.2. Визначення сил інерції ланок………………………........…30
2.6.3. Силовий розрахунок групи 4-5………………………..……31
2.6.4. Силовий розрахунок групи 2-3………………………..……32
2.6.5. Силовий розрахунок вхідного механізму……………….…33
2.7. Знаходження зрівноважувального моменту методом Жуковського…...34
2.8. Побудова графіка залежності МЗР від кута повороту кривошипа φ……36
3. Визначення моменту інерції маховика за методом енергомас (Лист 3)……………………………….................................................................….38
3.1. Побудова графіка зведеного моменту сил опору…….....................…..38
3.2. Побудова графіка робіт сил опору……………………….......................39
3.3. Побудова графіка надлишкової роботи………………………………...39
3.4. Побудова діаграми зведених моментів інерції ………………………..40
3.5. Побудова діаграми Віттенбауера та визначення моменту інерції махо-вика ………………….…................................................................................…41
3.6. Визначення геометричних розмірів маховика та маси маховика.........42
4. Синтез кулачкового механізму ( Лист 4) ……………………............…45
4.1. Побудова кінематичних діаграм…………………………………………46
4.2. Визначення мінімального радіусу кулачка графічним методом………48
4.3. Побудова профілю кулачка………………………………………………49
4.4. Аналітичне визначення радіус-вектора
теоретичного профілю кулачка……………………………………………….50
Література……………………………………………………………………. 52
Состав: курсовая работа, записка
Софт: сdw, doc