Промышленный робот М20Ц.48.01
Специализированный ПР М20Ц.48.01 предназначен для выполнения загрузочно-разгрузочных операций при обслуживании станков (прежде всего токарно-револьверных), в том числе с ЧПУ. ПР приспособлен для работы с накопителями заготовок и деталей, уложенных в приспособлении-спутнике в ориентированном виде (при горизонтальном расположении оси). Типовые детали — короткие тела вращения (типа фланцев) диаметром от 40 до 160 мм и высотой до 100 мм.
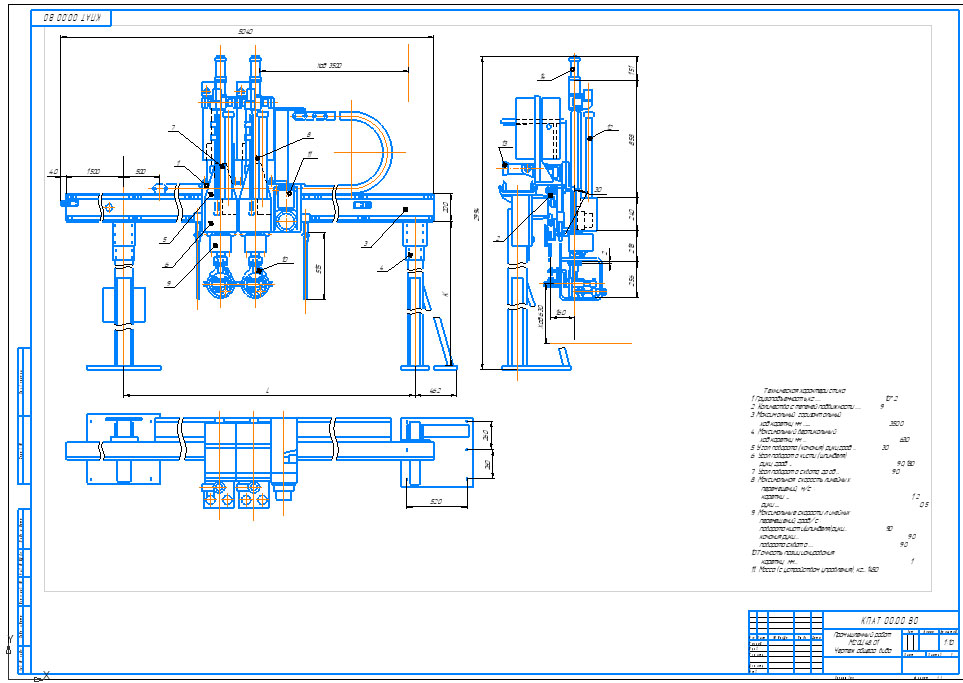
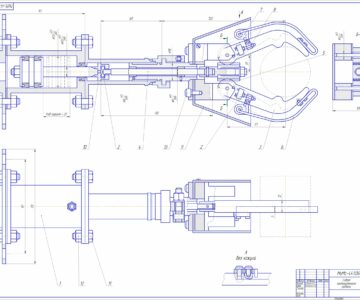
Общий вид и техническая характеристика ПР М20Ц.48.01 приведены на листе 1.
Промышленный робот имеет портальную конструкцию. Каретка 1 Перемещается по монорельсу 2, закрепленному на портале 3, который установлен на колоннах 4. Несущая система ПР — сварная с дополнительными ребрами жесткости.
На каретке 1 установлены две поворотные плиты 5, к каждой из которых крепится корпус 6 выдвижной руки. Робот имеет две руки — разгрузочную 7 и загрузочную 8, имеющие одинаковую конструкцию. Основание плиты 5 крепится к каретке 1 винтами с возможностью установочного перемещения по вертикали в пределах 50 мм. Корпус 6 каждой руки также имеет возможность установочного перемещения в пределах 50 мм вдоль горизонтальной оси. В нижней части каждой руки 7 и 8 установлена поворотная кисть (шпиндель) 9, в котором закрепляется захватное устройство 10. Привод каретки — электромеханический, а приводы вертикального перемещения 12 и качания 13 рук, а также приводы 14 схватов — пневматические.
Управление ПР осуществляется от устройства ЦПУ типа УЦМ-663.
ПР имеет несколько вариантов исполнения, отличающихся размерами К и L портала.
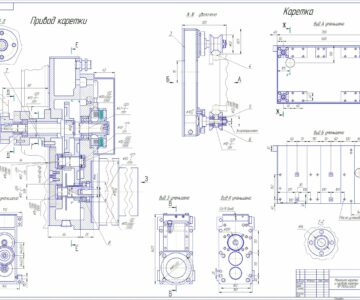
Кинематическая схема ПР М20Ц.48.01 приведена на листе 2.
Привод горизонтального перемещения каретки 1 по монорельсу 2 осуществляется электродвигателем 3 постоянного тока ДПУ160 через зубчатый редуктор с передаточным отношением 18/46. Шестерня, установленная на выходном валу редуктора, зацепляется с зубчатой рей¬кой 4, закрепленной на монорельсе. На противоположном конце выходного вала редуктора установлен электромагнитный тормоз 5 типа ЭТМ-056 который фиксирует каретку в заданных позициях.
К основанию поворотной плиты 6 шарнирно присоединен пневмоцилиндр Ц6, при движении штока которого поворотная плита вместе с рукой 7 отклоняется от вертикали на угол 30°.
Рука 7 перемещается в ее корпусе на роликах 8. Поворот кисти (шпинделя) 9 руки производится пневмоцилиндром Ц2 через зубчатую peйкy 10, закрепленную на его штоке, и шестерню z6, которая жестко связана с трубой 11. Выдвижной упор 12, приводимый пневмоцилиндром Ц5, определяет среднее положение рейки 10 при повороте шпинделя 9 на угол 90°.
Толкатель 13, проходящий внутри трубы 11, связан со штоком пневмоцилнндра Ц1 привода сменного захватного устройства 14.
Вертикальное перемещение каждой руки производится пневмоцилиндром ЦЗ, штоки которых связаны с рукой через пружину 15, позволяющую осуществлять движение до упора схвата в заготовку или деталь. При отсутствии давления в пневмоцилиндре Ц1 рука 7 фиксируется защелкой 16, открываемой пневмоцилиндром Ц4.
- Главная -
- Чертежи -
- Машиностроение и механика -
- Промышленные роботы и робототехника -
- Чертеж Промышленного робота М20Ц.48.01.
Чертеж Промышленного робота М20Ц.48.01.
0
404
36885
78
0
20
Сообщить о проблеме
Автор
Дата
29.12.2011
Язык
Русский
Состав
Общий вид(ВО) , Кинематическая схема.(КС). Спецификация
Софт
КОМПАС-3D V10 SP2 Portable
Как открыть?
Содержимое архива
-
Чертеж4.cdw
-
Чертеж 678.cdw
-
Спецификация ПРh.cdw
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:
Комментариев пока нет
Чтобы оставить комментарий, необходимо войти
Войти с помощью:
Ссылка на логин через google
Ссылка на логин через vk
Ссылка на логин через yandex