ДГТУ(Донской Государственный Технический Университет)
Кафедра"Робототехника и мехатроника"
Курсовой проект по дисциплине "Роботы и робототехнические системы"
Тема :"Проектирование манипулятора ПР агрегатно-модульной конструкции"
Ростов-на-Дону 2012 год
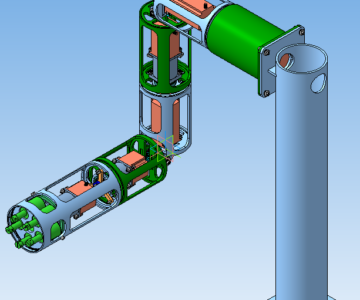
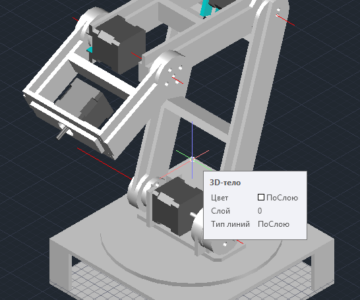
Целью данной курсовой работы является проектирование промышленного робота агрегатно-модульной конструкции.
Агрегатно-модульный метод построения предполагает создание конструкции ПР на базе ограниченной группы нормализованных узлов, и имеет ряд преимуществ
Техническое задание
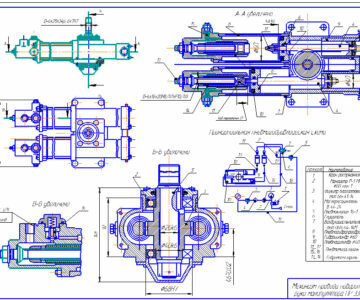
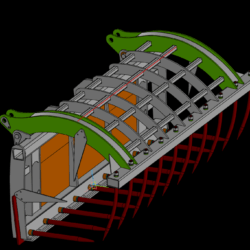
Тема: Проектирование манипулятора ПР агрегатно-модульной конструкции с тремя степенями подвижности.
Номер задания: 13
Исходные данные:
• Структура робота: НО – П(Z)-СП(Z)-П(Y);
• Тип Системы и модулей: РПМ-25;
• Значения обобщенных координат: q1 = 0,4 м; q2 = 300 град; q3 = 1 м;
• Макс. значения обобщенных координат: q1 = 0,4 м; q2 = 270 град; q3 = 0,6 м;
• Значения обобщенных скоростей: = 0,4 м/c; = 135 град/с; = 0,6 м/с;
• Точность позиционирования, мм: 1 мм.
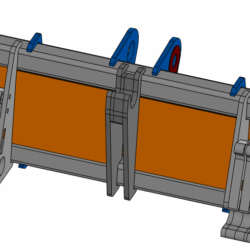
Деталь:
• Эскиз (рисунок 1):
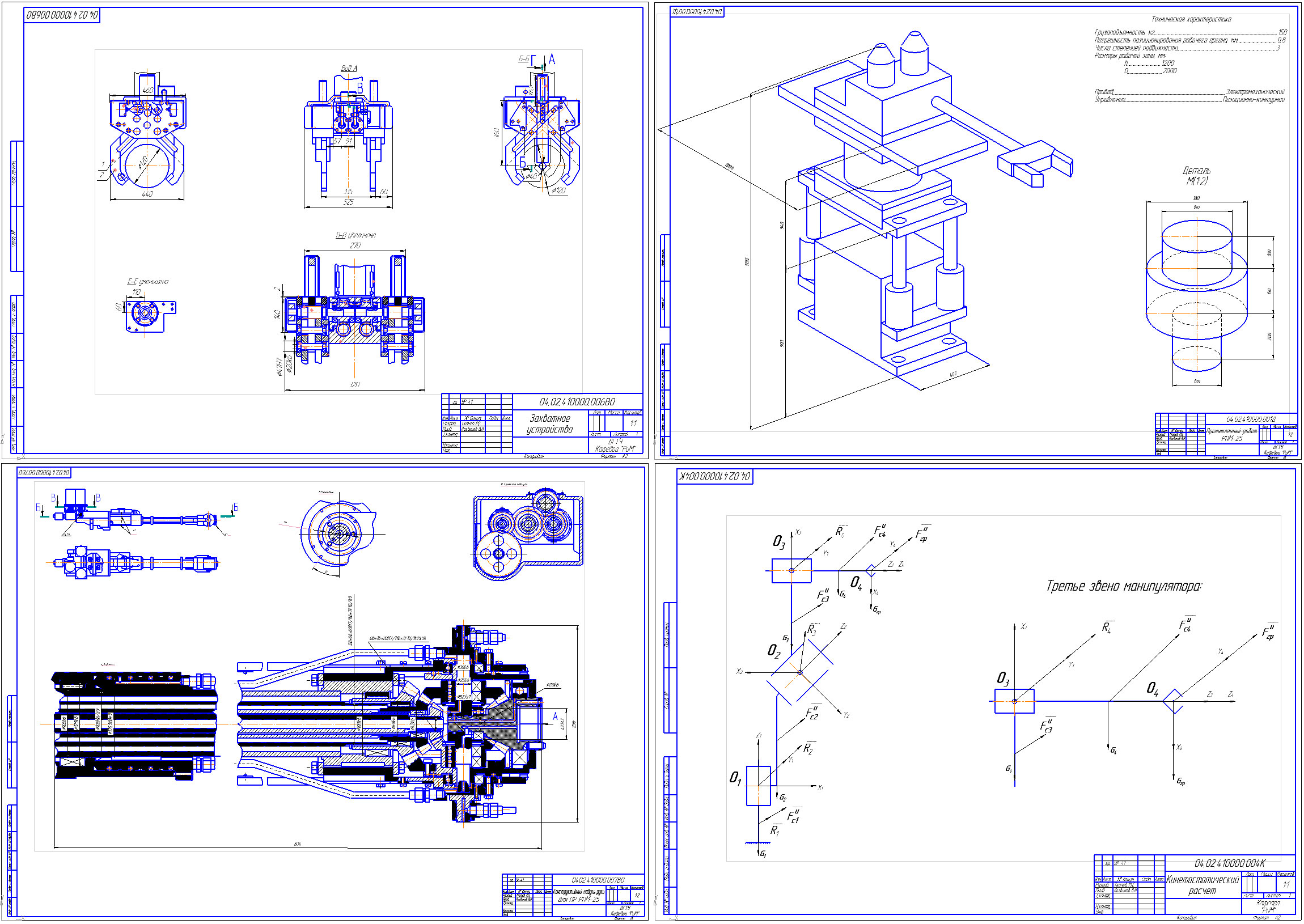
Техническая характеристика
Грузоподъемность, кг 150
Погрешность позиционирования рабочего органа, мм 0,8
Число степенией подвижности 3
Размеры рабочей зоны, мм:
h 1200
D 2000
Привод Электромеханический
Управление Позиционно-контурное
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности