НТУ "ХПИ"
Гидропневмоавтоматики и гидроприводов
Курсовой проект по курсу "Проектирование систем ГПП и оборудования промышленных роботов"
2015
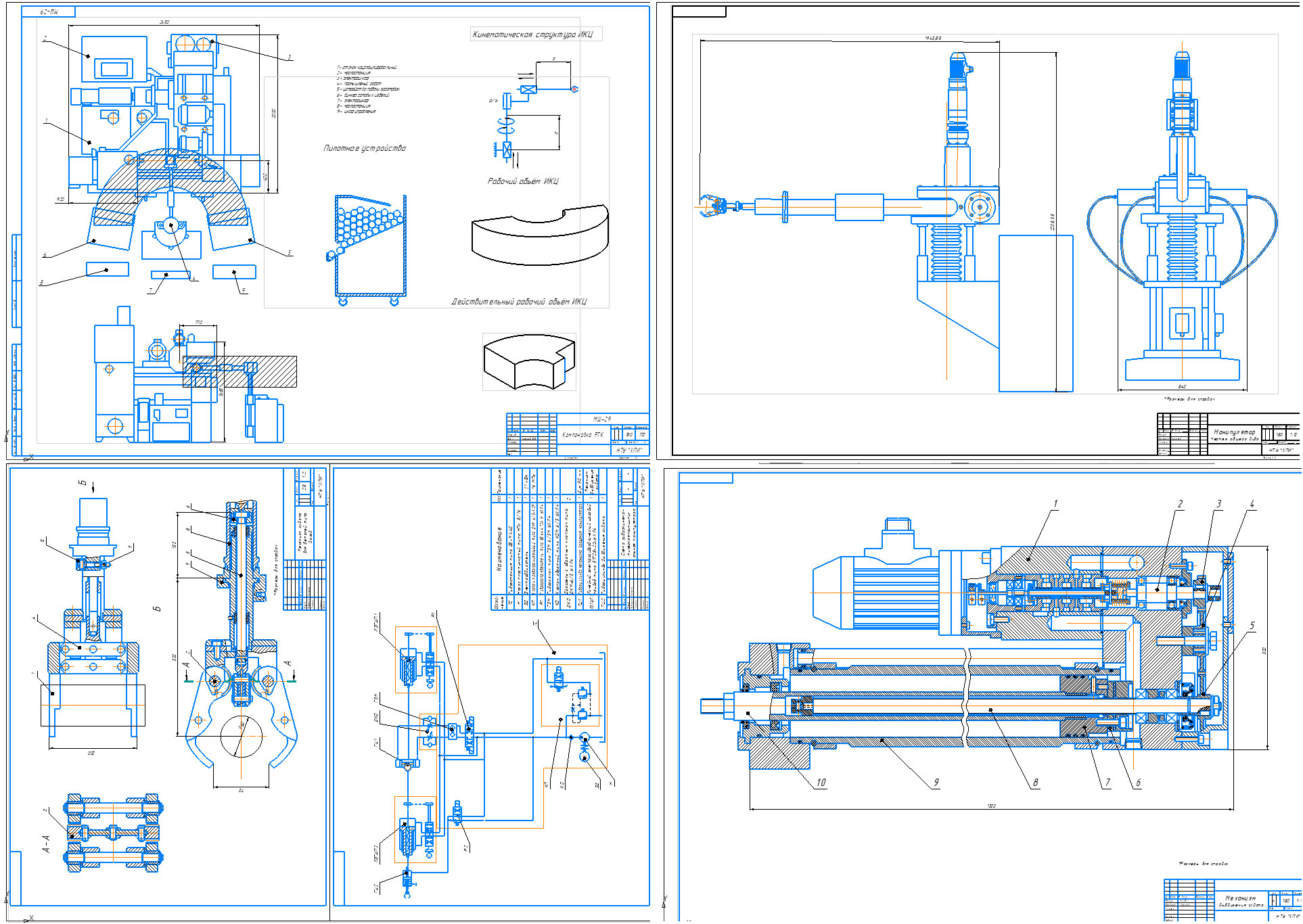
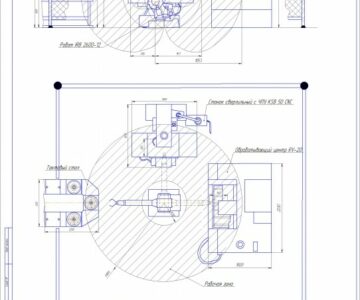
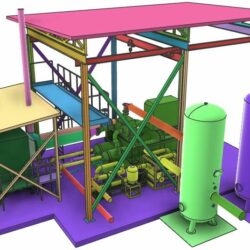
Задача: Разработка целевого промышленного робота для создаваемого комплексно-роботизированного участка РТК по выполнению технологической операции наружного круглого шлифования.
Цель разработки - РТК шлифовальных операций – это более рациональная и гибкая форма обработки детали, позволяющая повысить технико-экономические показатели с одновременным высвобождением человека от тяжёлого и напряженного труда в условиях конвейерной линии и переходом к бригадному комплексному подряду.
Исходные расчетные параметры на проектирование (ограничения):
- структура РТК: по схеме РТК - позиция, или РТК - участок;
- типоразмер обрабатываемых деталей: Форма - цилиндрическая;
Наибольшая длинна - до 0,6м;
Наибольший диаметр - до 0,06м.
- габаритные размеры станка по рис. общего вида в трех проекциях;
Основные параметры типоразмерного ряда промышленного робота (ПР):
- максимальная грузоподъемность - 20 кг;
- тип компоновки - модульный;
- число степеней подвижности - 3 степеней;
В результате выполнения проекта были уточнены недостающие элементы технической характеристики ПР:
- типы приводов по каждой координате: 3 - гидравлических привода,
1 - механический привода;
- число точек позиционирования по каждой степени подвижности (по 2 - 3 конечных выключателя)
- максимальное значение геометрических параметров ПР:
- выдвижение схвата 0,6м;
- угол поворота колоны 90˚;
- рабочее давление в гидросистеме ПР 125атм;
Масса промышленного робота 800 кг.
Материал детали Сталь 45.
СОДЕРЖАНИЕ
Задание
Введение
- Зачем использовать роботов
- Системы управления промышленными роботами. Классификация.
- Специфика разработки РТК.
1. Расчет рациональной структуры РТК
- Вариант І Условное обозначение: В(П)ПП.
- Расчет рациональной структуры РТК
- Определение зависимости между степенями подвижности ИКЦ
- Расчёт энергетических показателей ПР
- Вариант ІІ Условное обозначение: В(П)ПП.
- Расчет рациональной структуры РТК
- Определение зависимости между степенями подвижности ИКЦ
- Расчёт энергетических показателей ПР
- Вариант ІІІ Условное обозначение: ПВ(П)П.
- Расчет рациональной структуры РТК
- Определение зависимости между степенями подвижности ИКЦ
- Расчёт энергетических показателей ПР
- Вариант ІV Условное обозначение: ПВП.
- Расчет рациональной структуры РТК
- Определение зависимости между степенями подвижности ИКЦ
- Расчёт энергетических показателей ПР
2. Результат расчета
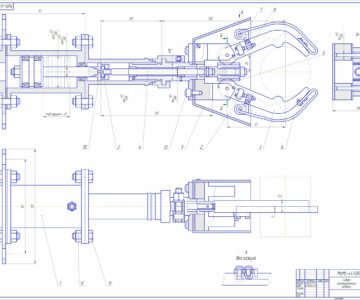
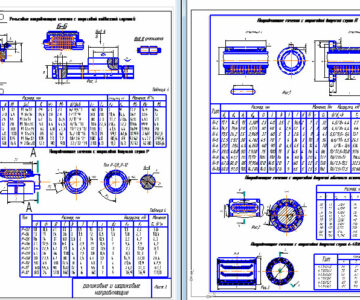
3. Расчет и разработка конструкции механического захватного устройства.
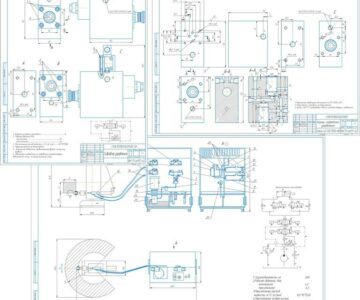
4. Выбор насосной установки
5. Анализ тепловых потерь гидравлической энергии и потребной мощности насосной установки
6. КПД приводов
7. Выбор параметров электродвигателя поворотной координаты
8. Описание работы механизмов ПР
Выводы
Список источников информации



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности