СевНТУ Кафедра АТПП
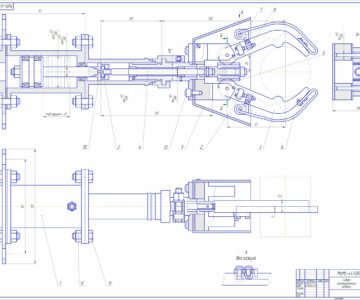
дипломный проект на тему: «Автоматизированный комплекс электростатической покраски с мультипозиционными пневмоприводами, обеспечивающий минимум расхода лакокрасочных материалов»
Севастополь 2013
Дипломный проект состоит из пояснительной записки на 172 листах формата А4, которая содержит 92 рисунка и схемы, 4 таблицы, 10 листов графической части формата А1 и 23 использованных источника.
Предмет исследования: мультипозиционный пневмопривод и его динамические характеристики, позволяющие построение промышленных окрасочных роботов без использования позиционных датчиков.
Цель ДП: Разработка методов стабилизации скорости и траектории работы окрасочного манипулятора с мультипозиционными пневмоприводами с учетом методов математического и натурального моделирования динамики МПП, управляемых ПЛК и внедрение разработанных на этой основе ПР с МПП в покрасочное производство.
Методы исследования, технические и программные средства: При анализе характеристик покрасочных ПР применены принципы системного подхода, матричные методы исследования пространственных кинематических цепей, теория квалиметрии механизмов. Исследования динамических характеристик ПР с МПП основаны на общей теории газо- и термодинамики, теории дифференциальных уравнений, теории графов и математической логике. Исследование предложенной математической модели динамики МПП проведено путем численного решения системы нелинейных дифференциальных уравнений на компьютере. При натурном моделировании динамики ПР использован метод регистрации траектории выходного звена робота посредством индуктивного датчика, магнита и компьютера с соответствующим ПО.
Основные конструктивные, технологические и другие характеристики: производительность цеха окраски порошковыми материалами – 540 кг/час.
Полученные результаты и их новизна: предлагаемая технология и оборудование основаны на запатентованных разработках компании Kremlinrexon-Sames (Франция) и авторских свидетельствах доцента Карлова АГ. Разработанный метод применения МПП в окрасочных цехах позволит снизить расходы на оборудование для покраски и обеспечит минимальный расход ЛКМ.
Значимость выполненной работы и выводы: данная работа открывает значительные перспективы для развития покрасочных технологий в Украине и других странах СНГ.
Рекомендации об использовании результатов и отрасли применения: есть реальные основания рекомендовать потенциальным инвесторам обратить внимание на новые энергосберегающие и экологичные технологии и оборудование, которое показывает и высокую рентабельность подобного нового производства.
Степень внедрения материалов: подобная технология получает развитие на современных предприятиях таких как ОАО «Камоцци-Пневматик-Симферополь». Данный метод управления приводами интересует клиентов за счет более высокой производительности и надежности, а также менее высокой стоимостью, чем у позиционных пневмоприводов.




Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности