Южно-Уральский Государственный Университет Миасский Машиностроительный факультет
Кафедра «Технология производства машин»
Курсовая работа по курсу «автоматизация производства в машиностроении».
Миасс 2011г.
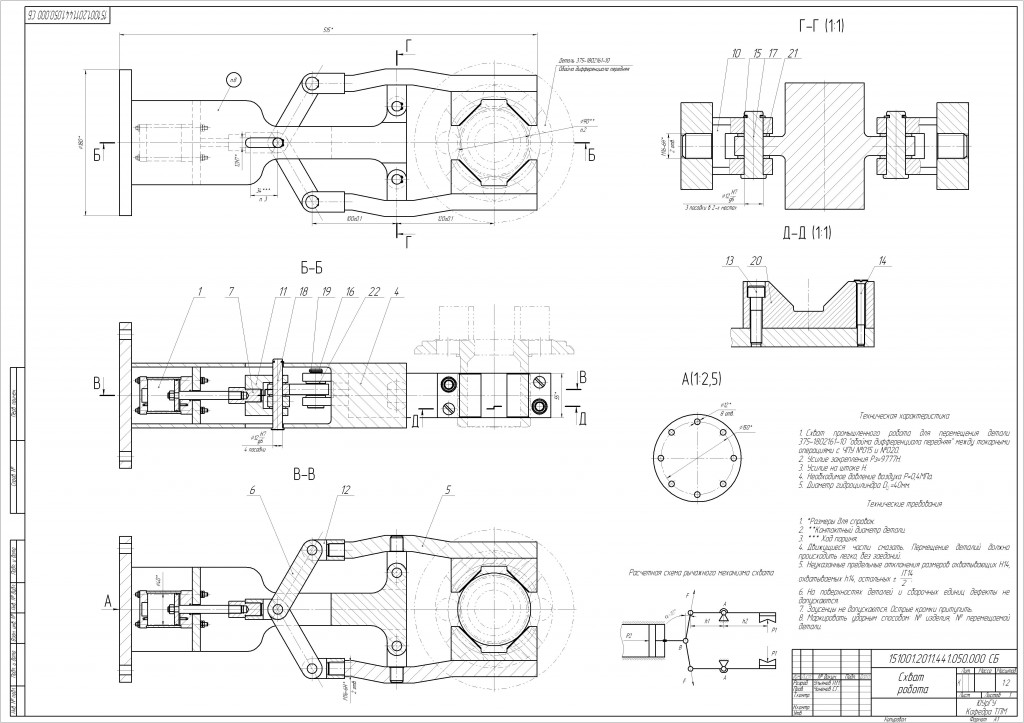
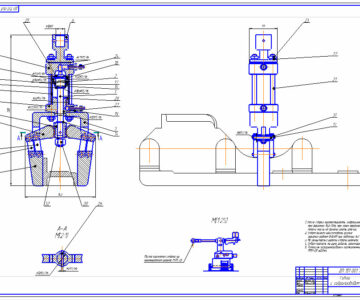
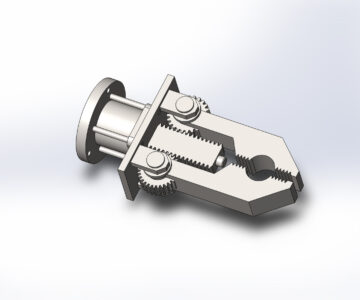
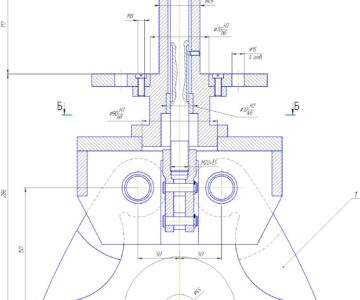
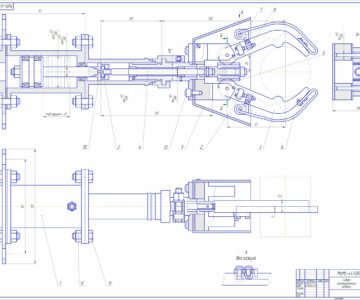
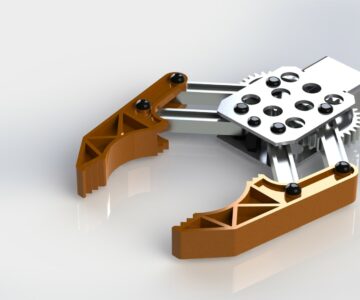
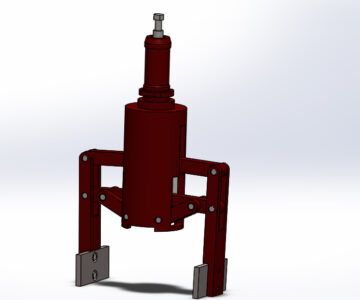
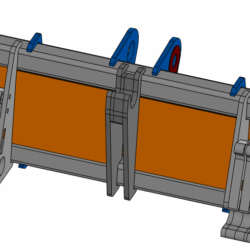
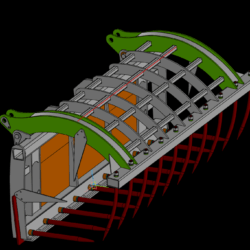
Схват промышленного робота для перемещения обоймы дифференциала передней.
Техническая характеристика
1. Грузоподъемность, кг 16
2. Число степеней подвижности 4
3. Число программируемых координат 3
4. Наибольший вылет руки, мм1525
5. качание звеньев руки в вертикальной плоскости, град 45
6. Поворот кисти руки вокруг продольной оси, град180
7. Скорость:
- горизонтальное перемещение руки, м/с 1,8
- качание звеньев руки, град/с 30
- поворот кисти руки, град/с 90
8. Погрешность позиционирования, мм 0,5
9. Число захватных устройств 1
10. Масса робота, кг 1000
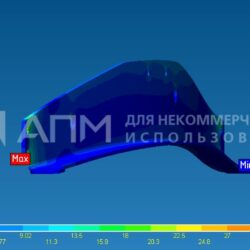
В данной курсовой работе для детали 75-1802161-10 «обойма дифференциала передняя» спроектирован схват промышленного робота для перемещения детали по роботизированном технологическому комплексу. Произведен Анализ известных типовых схем схватов, произведено обоснование выбранной конструкции схвата и описание его работы. Был произведен расчет потребного усилия захвата заготовки и приводного пневмоцилиндра, определены усилия в элементах схвата и его конструктивные параметры. Также был произведен выбор привода промышленного робота и выбор транспортно-складской системы.




Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности