Государственный университет "Житомирская политехника"
Кафедра механической инженерии
Прикладная механика
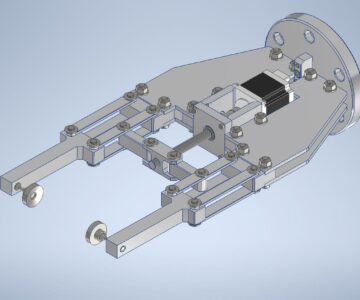
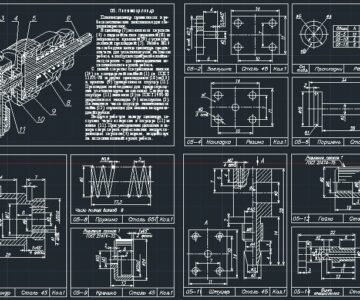
Усовершенствование конструкции пневмоцилиндра промышленного робота РФ-202М
2024
Тема работы: «Совершенствование конструкции пневмоцилиндра промышленного робота РФ-202М».
Выходные данные для работы: задачи руководителя работы, технические харктеристики промышленного робота РФ-202М, техническая литература и научная периодика по направлению работы, материалы с сайтов производителей оборудования, материалы учебников и справочников
Список задач, которые необходимо решить: провести аналитическое исследование факторов, влияющих на точность позиционирования рабочих органов промышленных роботов, выполнить анализ математической модели определения положения захватного устройства; выполнить анализ погрешности позиционирования рабочего органа вследствие упругих деформаций звеньев манипулятора; выполнить конструкторскую разработку узла поворота и пневмоцилиндра для повышения точности позиционирования; разработать технологию изготовления детали "Шток" модернизированного узла.
содержание
Введение
Раздел 1 Технологический раздел
1.1 Анализ главных условий внедрения промышленных роботов в машиностроении
1.2 Анализ причин возникновения погрешностей позиционирования в промышленных работах
1.3 Экспериментальные исследования
Раздел 2 Конструкторский раздел
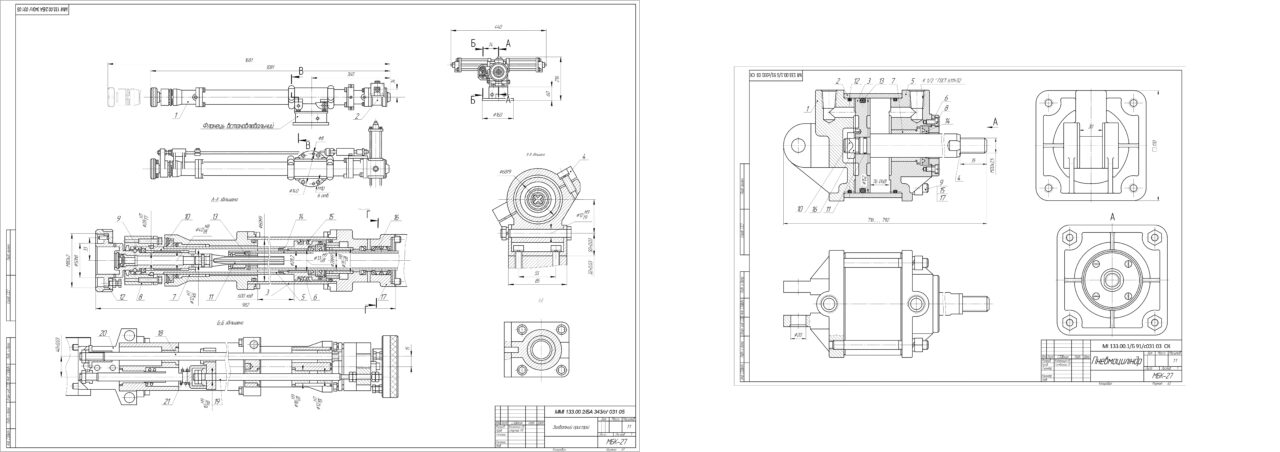
2.1 Определение параметров пневмоцилиндра
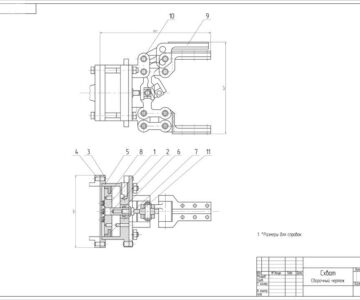
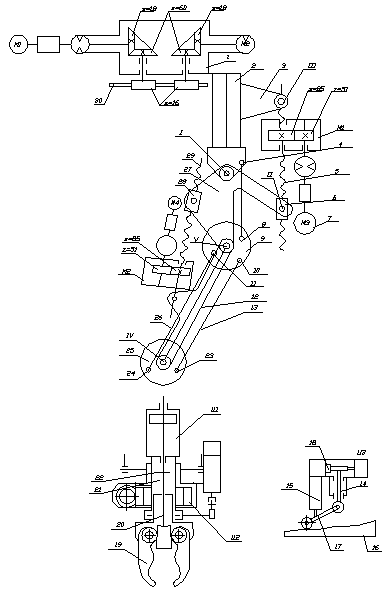
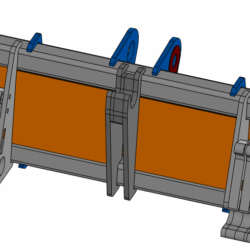
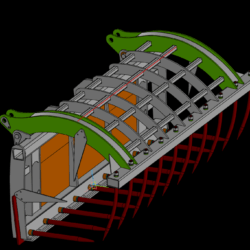
2.2 Проектирование захватного устройства
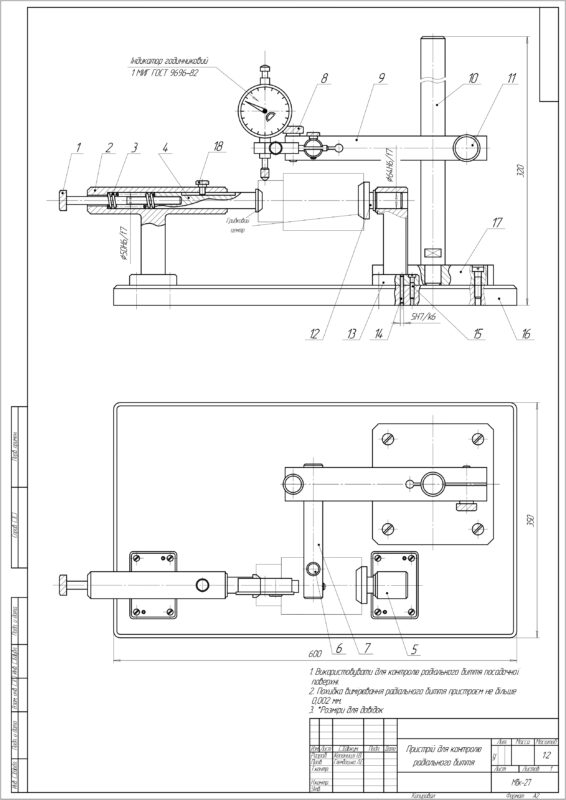
2.3 Расчет контактных напряжений при захвате заготовки губками захватного устройства
2.4 Проектирование пневмопривода
2.5 Проектирование поворотного механизма
Глава 3 Специальный раздел
3.1 Разработка технологического процесса изготовления детали Шток
3.2 Выбор оборудования и средств технологической оснастки
3.3 Расчет припусков на обработку
3.4 Расчет режимов резки
Выводы
Список литературных ссылок
Приложения
Усовершенствование конструкции пневмоцилиндра промышленного робота РФ-202М
Цель работы: повышение точности позиционирования рабочего органа с пневмоприводом за счет усовершенствования узлов поворота и перемещения захватных устройств
Объект исследования: промышленный робот РФ-202М с пневмоприводом
Предмет исследования: точность позиционирования рабочих органов промышленного работа с пневмоприводом.
Задачи исследования:
1. Провести анализ факторов, влияющих на точность позиционирования рабочих органов промышленных роботов.
2. Выполнить анализ математической модели определения положения захватного устройства, учетом перемещений в зазорах подвижных звеньев манипулятора и динамики системы.
3. Выполнить анализ погрешности позиционирования рабочего органа вследствие упругих деформаций звеньев манипулятора.
4. Разработать конструкции узла поворота и пневмоцилиндра для повышения точности.позиционирование.
5. Разработать технологию изготовления детали "Стакан" с применением современных станков с ЧПУ и CAM систем


Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности