МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНСТИТУТ ЭЛЕКТРОНИКИ И МАТЕМАТИКИ
Кафедра «Робототехнические системы и комплексы»
Курсовой проект по дисциплине "Конструирование мехатронных модулей"
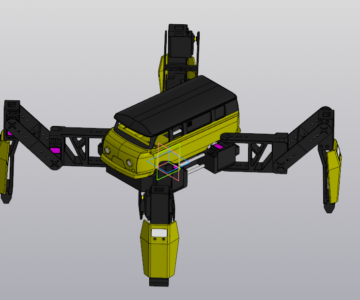
На тему: "Виброробот"
Москва 2012
В результате выполнения курсового проекта был сконструирован вибрационный прыгающий робот для мониторинга труднодоступных мест (труб), удовлетворяющий требованиям технического задания.
Техническое задание:
Спроектировать вибрационный прыгающий робот для мониторинга труднодоступных мест (труб), управляемый с помощью микропроцессорной системы автоматического управления.
Микроробот должен бесперебойно выполнять свои функции при следующих внешних условиях:
а) температура окружающей среды от -30˚С до +50˚С;
б) влажность окружающей среды не более 95% при температуре +30˚С;
в) давление 740±25 мм.рт.ст.
Содержание
Техническое задание 3
Введение 4
1. Обзор существующих конструкций 5
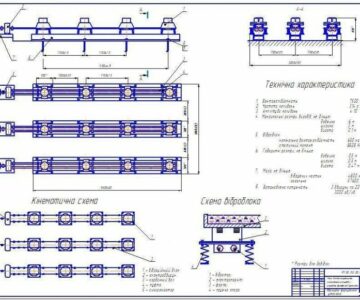
2. Моделирование процесса движения 10
2.1. Исходная механическая модель 10
2.2. Уравнения движения вибрационного «прыгающего» робота 12
2.3. Компьютерное моделирование движения вибрационного «прыгающего» робота 17
2.4. Результаты моделирования 25
3. Расчетная часть 31
3.1. Выбор двигателя 31
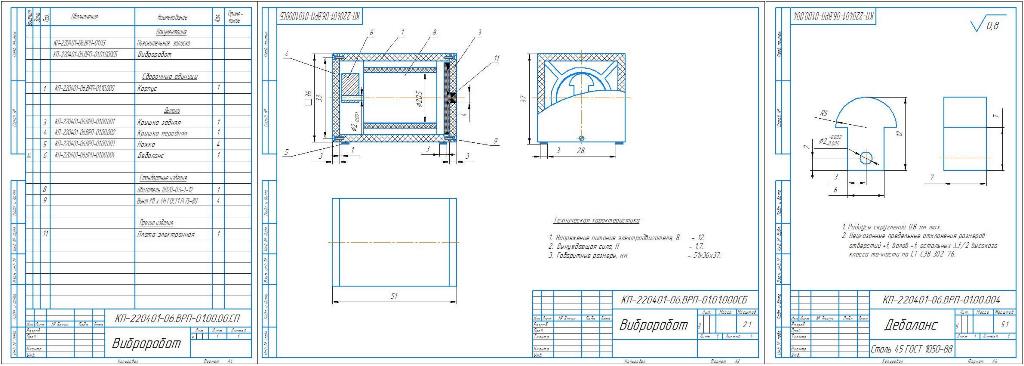
3.2. Разработка конструкции дебаланса 31
3.3. Расчет посадки с натягом 34
3.4. Расчет клеевого соединения 36
Заключение 38
Библиографический список 39


Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности