Кафедра «Металлообрабатывающие станки и комплексы»
Курсовой проект по дисциплине "Транспортно-накопительные системы и промышленные роботы"
На тему: "Проектирование и расчет промышленных роботов"
2012 год
Объектом проектирования и анализа является промышленный робот или роботизированный технологический комплекс, разрабатываемые на основе конкретного технологического оборудования или задания.
Целью курсовой работы является развитие навыков проектирования конструкций промышленных роботов (ПР) и анализ возможности встраивания их в станочные комплексы.
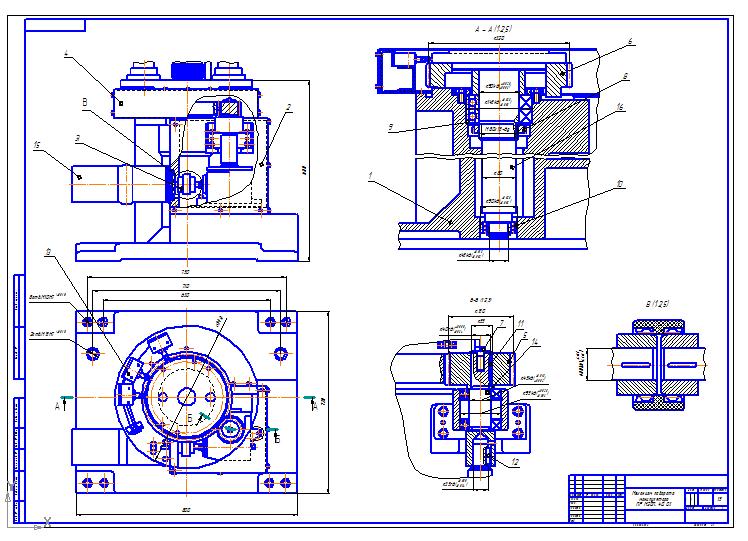
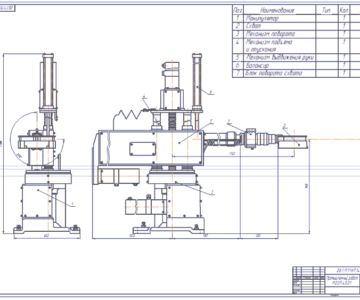
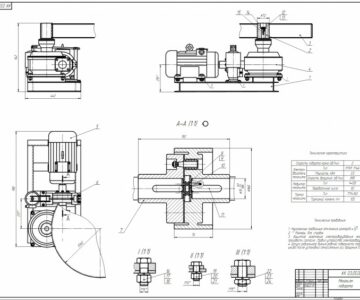
Так же представлена разработка механизма поворота манипулятора ПР М20П. 40. 0.1
Пояснительная записка содержит 21 листов формата А4, 1 листа формата А3,
спецификация.
Параметры станочной системы
Тип станка 16К20Ф3С32
Количество станков i=1
Количество накопителей заготовок m=1
Время обработки на 1станке Tm1=90секунд
Параметры манипулятора
Масса траверсы mT=180кг
Масса схвата mC=18кг
Скорость вертикального перемещения Vв=0,15 м/с
Угловая скорость поворота траверсы ωк=1,5рад/с
Расстояние между опорами направляющих l1=400мм
Расстояние между опорами направляющих l2=350мм





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности