Тульский Государственный Университет
Кафедра мехатроники и роботехники
Курсовой проект по дисциплине "Проектирование роботов и роботехнических систем"
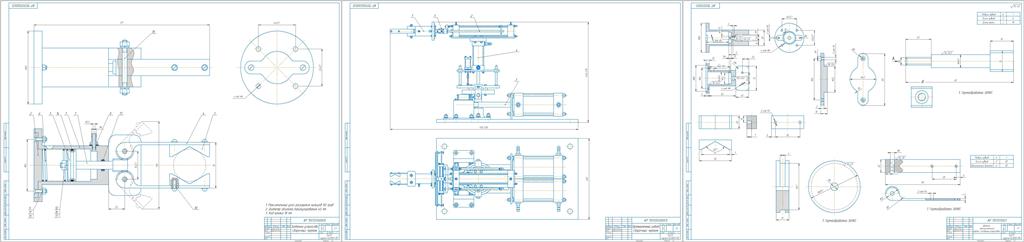
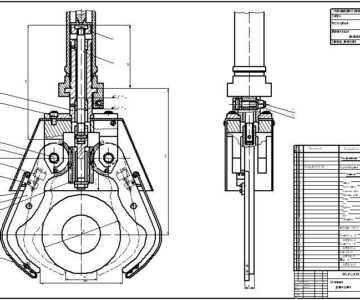
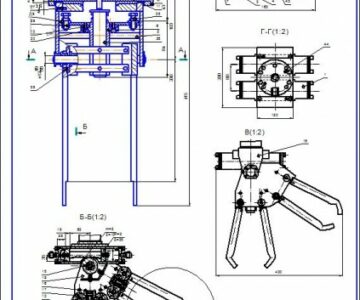
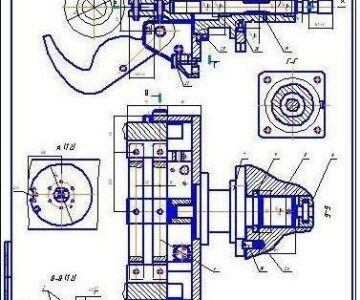
На тему: "Разработка захватного устройства с пневматическим приводом одностороннего действия и возвратной пружиной"
Тула 2020
Задание
Разработать захватное устройство (далее ЗУ) с пневматическим приводом (далее ПП) одностороннего действия и возвратной пружиной. Поступательное движение штока ПП преобразуется во вращательное с помощью передачи рейка – шестерня для сжатия объекта манипулирования (далее ОМ) пальцами схвата. Грузоподъемность робота, для которого разрабатывается ЗУ, равна 2 кг. Удерживаемый ОМ имеет форму цилиндра с диаметром 40 мм.
Содержание
Задание…………………………………………………………………………3
Введение………………………………………………………………………..4
1. Теоретическая часть………………………………………………...…5
2. Пневматические захваты………………………………………….….11
2.1 Универсальные камерные захваты………………………………....11
2.2 Пневматические захваты с надувными эластичными пальцами....12
2.3 Бесконтактные струйные захваты……………………………...…..13
3. Конструктивно - компоновочная схема разрабатываемого захватного устройства…………………………………………………………….……….16
4. Расчет момента удержания в захватном устройстве……………….....17
5. Расчет передачи рейка - шестерня………………………………...……..20
6. Расчет параметров привода ……………………………………………...22
6.1 Определение потребной мощности привода…………………..…..22
6.2 Определение параметров линии питания……………………….....24
6.3 Оценка величины движущей силы сопротивления…………….....25
6.4 Выбор площади сечения поршня…………………………...……...26
6.5 Определения конструктивных размеров пневмопривода……...…27
6.6 Расчет параметров возвратной пружины……………………..…....28
7. Пневматическая схема захватного устройства…………………………29
8. Заключение………………………………………………………….……….30
9. Список используемой литературы…………..………………………..….31

Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности