Сибирский государственный университет науки и технологий имени академика М. Ф. Решетнева.
Кафедра технологии машиностроения
Курсовой проект по дисциплине: «Манипуляционные системы роботов»
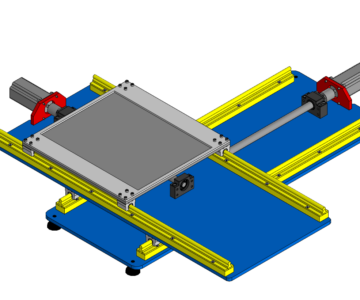
На тему: «Разработка манипуляционной системы перемещения фрезерной головки»
Красноярск 2016
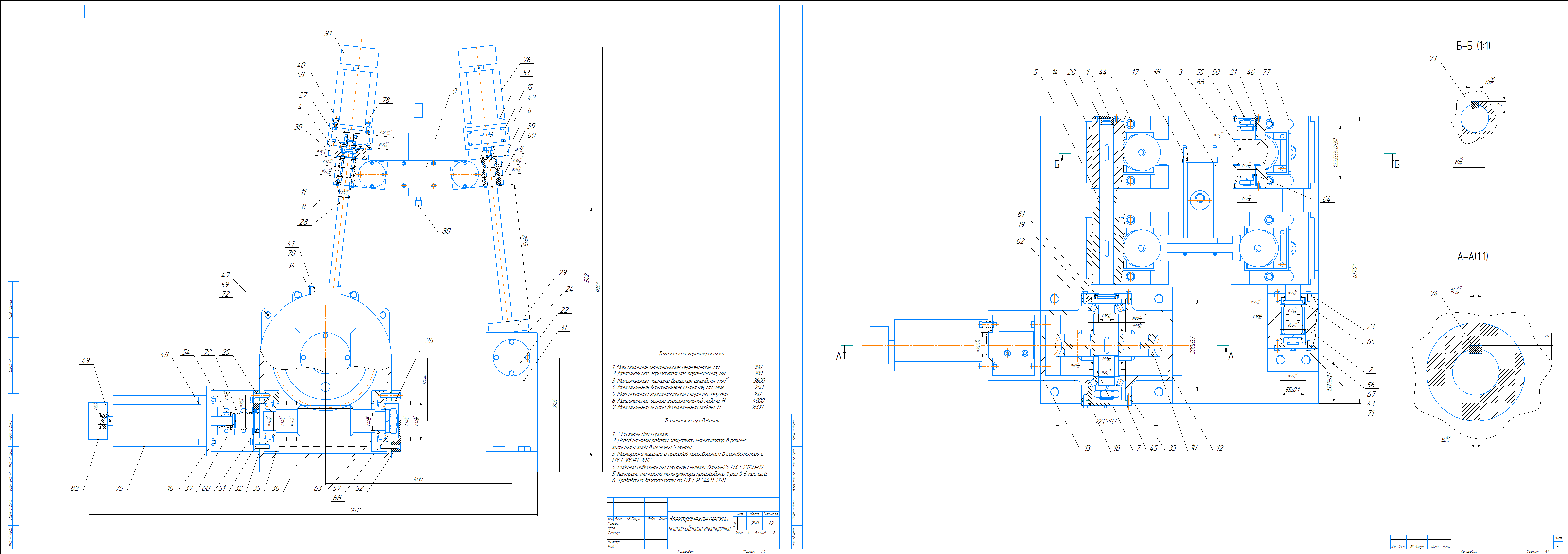
Максимальное вертикальное перемещение, мм 100
Максимальное горизонтальное перемещение, мм 100
Максимальная частота вращения шпинделя,〖мин〗^(-1) 3600
Максимальная вертикальная скорость, мм/мин 250
Максимальная горизонтальная скорость мм/мин 150
Максимальное усилие горизонтальной подачи, Н 4000
Максимальное усилие вертикальной подачи, Н 2000
Шаговый двигатель FL86STH118-604А
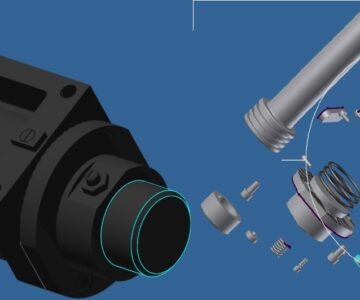
В данной работе производите проектирование манипулятора, выбор двигателя, расчет приводов, прямая и обратная задача кинематики, аналитический анализ, программы в LabView. Сборочные чертеж всего манипулятора, используется для автоматизации производства при фрезеровании. Разработаны и рассчитаны все компоненты.
ВВЕДЕНИЕ
1. АНАЛИТИЧЕСКАЯ ЧАСТЬ
1.1. Анализ последних достижений науки и техники в области манипуляционных систем роботов
1.2 Анализ поставленной задачи и возможное направление ее решения, с учетом проведенного патентно-информационного поиска
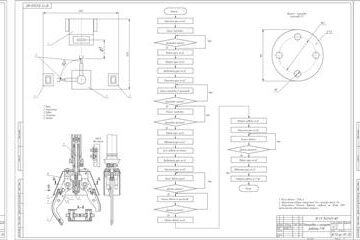
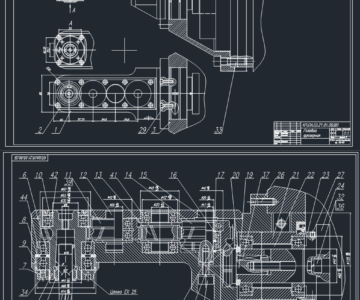
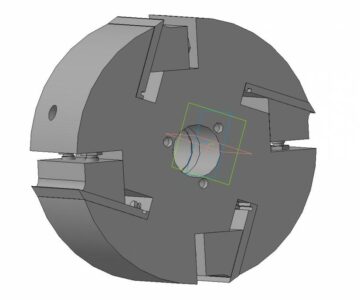
1.3 Описание устройства и принципа работы разработанного манипулятора
2. РАСЧЕТНАЯ ЧАСТЬ
2.1 Определение длин звеньев
2.2 Силовой расчет
2.3 Расчет приводов поступательного движения
2.3.1 Выбор двигателя
2.3.2 Кинематический расчет передачи
2.3.3 Силовой расчет передачи
2.4 Расчет червячной передачи
2.4.2 Расчет червячного колеса
2.4.3 Расчет элементов зацепления на контактную прочность и изгиб
3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
3.1 Решение прямой задачи кинематики
3.2 Решение обратной задачи кинематики
3.3 Планирование траектории
4. ЛИЦЕВЫЕ ПАНЕЛИ И БЛОК-ДИАГРАММЫ СОЗДАННЫХ ВИРТУАЛЬНЫХ ПРИБОРОВ
ЗАКЛЮЧЕНИЕ
СПИСОК ЛИТЕРАТУРЫ

Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности