Ярославский государственный технический университет
Кафедра «Компьютерно-интегрированная технология машиностроения»
Курсовой проект по дисциплине "Теория мехатронных систем"
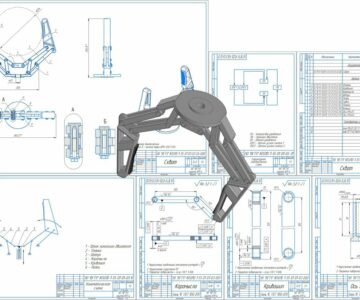
На тему: "Разработка мехатронной системы в виде манипулятора для загрузки-выгрузки оборудования"
Ярославль 2016
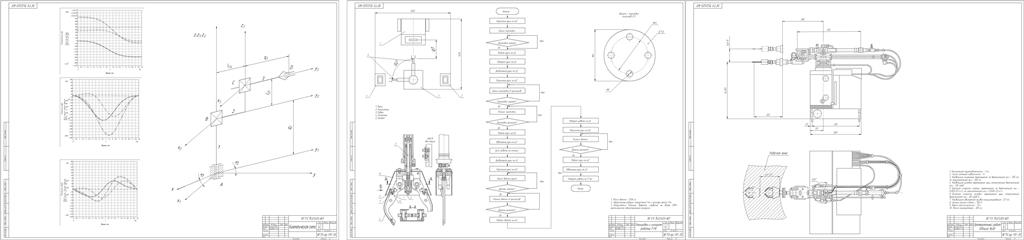
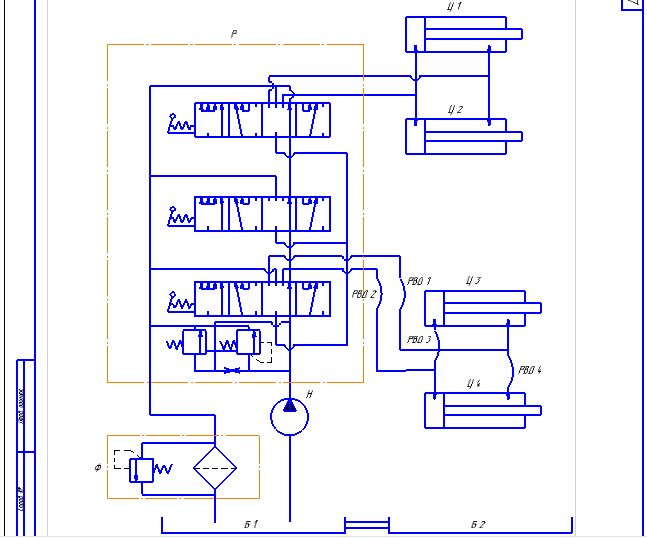
В данной работе выбираем робота, работающего в цилиндрической системе координат, состоящего из модуля поворота, подъема и модуля выдвижения штанги руки. Проводим расчет основных, кинематических и динамических параметров, определение погрешности позиционирования, выбор параметров привода и расчет схвата.
Содержание:
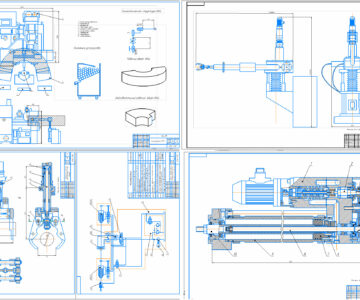
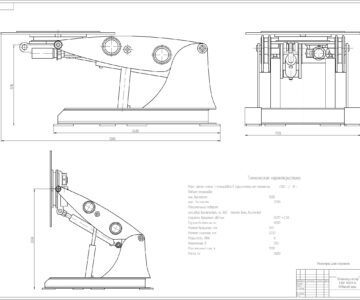
Разработка компоновки РТК
Разработка технических требований и определение основных
параметров робота
Кинематическое исследование манипулятора
Определение погрешности позиционирования точки D захвата
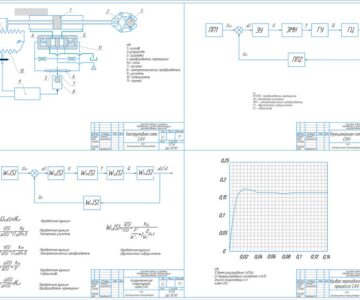
Динамический расчет исполнительных механизмов манипуляторов
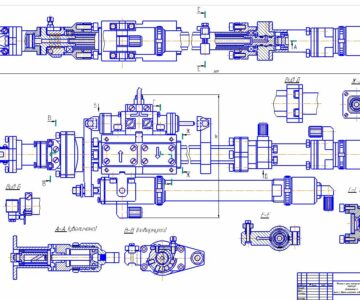
Выбор параметров привода выдвижения штанги руки манипулятора
Расчет механического схвата
Приложения
Вывод
Список использованной литературы

Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности