Ташкенсткий государственный университет им. И. А. Каримова
Кафедра Технология машиностроения
Курсовой проект по дисциплине "Автоматика и основы автоматизации производственных процессов"
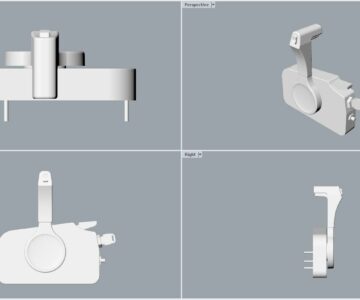
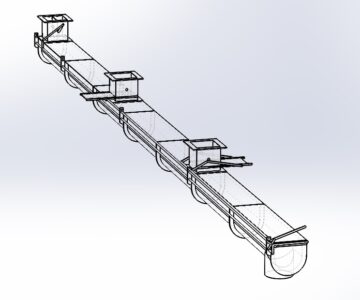
На тему "Система автоматического дистанционного управления манипуляором"
Ташкент 2023
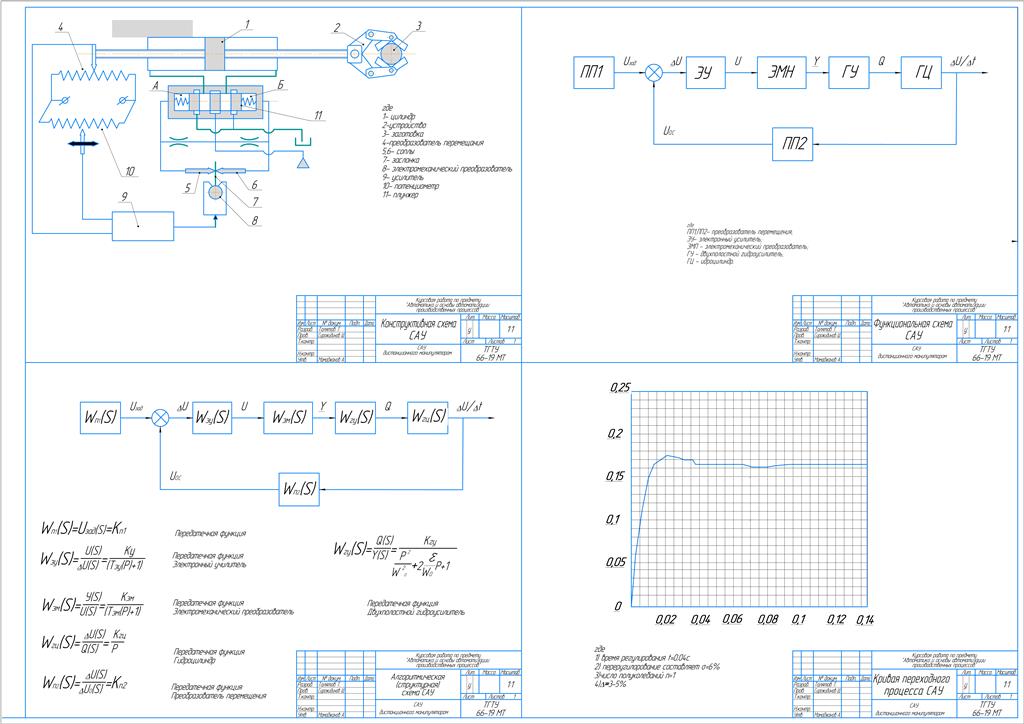
Параметры элемента САУ:
Электронный усилитель k(y)=360, T(y)=0.015 c
Электрический преобразователь k(э.м) = 4.5 мм/с, Т(э.м) = 0,075 С
Двухкаскадный k(z)= 8*10^6 мм^2/с, w = 400 рад/с, E = 0.55
Гидроцилиндр F(г.ц) = 80 см^2
Потенциометры k(э.п)=4 В/мм k(п.о.с)= 4 В/мм
Содержание
Введение 2-3 стр
1 Исходная схема заданной САУ 4-5 стр
2 Функциональная схема САУ 6 стр
3 Расчет общей передаточной функции разомкнутой САУ 7-8 стр
4 Определение устойчивости заданной САУ 9-10 стр
5 Определение передаточной функции замкнутой системы 11 стр
6 Построение графика ВЧХ 12 стр
7 Построение вещественных трапеций и графиков h-функций 13-14 стр
8 Анализ САУ 15 стр
Вывод 16 стр
Использованная литература 17 стр



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности