Целью данного курсового проекта является разработка конструкции двухстепенного манипулятора, проектирование отдельных деталей и изготовление их при помощи 3D печати, сборка робота, разработка системы управления манипулятором на основе Arduino.
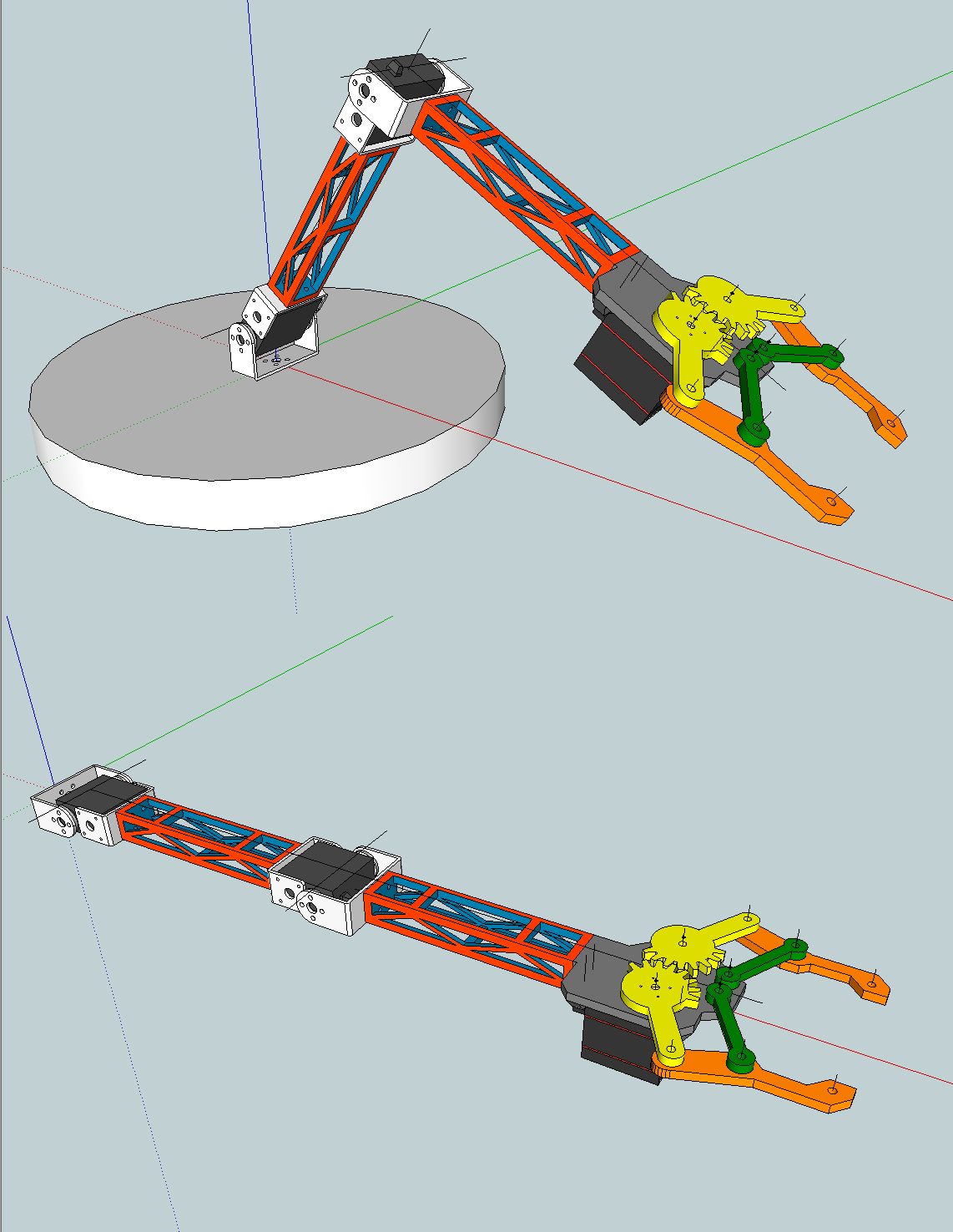
Манипулятор по принципу действия напоминает человеческую руку. В нём присутствуют поворотные соединения, которые обеспечивают наклон в плечевом соединении и сгибание в локте, механический захват, который позволит роботу хватать и перемещать предметы в разных направлениях.
Отличительная черта данной конструкции – очень высокая гибкость, позволяющая роботу обходить многие препятствия. Кроме того, робот этого типа достаточно компактен, и обслуживаемая им зона гораздо больше, чем занимаемое роботом место.
Несмотря на очевидные преимущества конструкции, управлять таким роботом достаточно сложно. При перемещении каждого звена принцип минимального значения требуемого угла, и манипулятор движется не по прямой линии (как декартов, например), а выполняет довольно сложную траекторию, имитируя движения живой руки. В результате мысленное представление всех движений «руки» сильно затруднено, что создаёт трудности при программировании.
Содержание
Введение 3
Постановка задачи 4
1. Области применения манипуляторов 5
2. Построение структурной кинематической схемы манипулятора 6
3. Решение прямой и обратной задачи кинематики манипулятора 7
4. Разработка конструкции манипулятора 10
4.1 Выбор сервоприводов 10
4.2 Проектирование деталей 12
4.2.1 Выбор САПР 12
4.2.2 Проектирование 1-го и 2-го звеньев 12
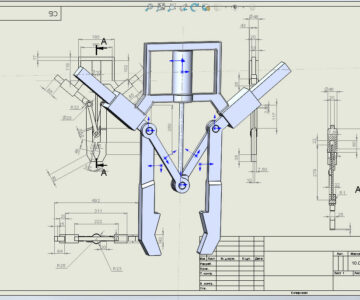
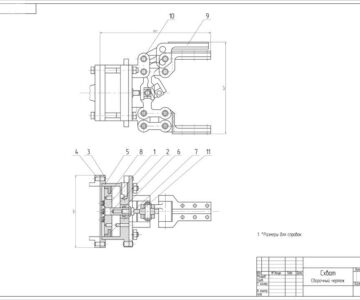
4.2.3 Проектирование схвата 14
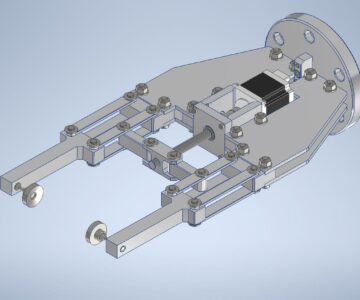
4.3 Модель собранного манипулятора 17
5. Изготовление деталей и сборка манипулятора 18
6. Разработка микроконтроллерной системы управления манипулятором на основе Arduino 21
Заключение 24
Список литературы 25
Приложение: Код программы для Arduino 26
All right
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности