Захватные устройства являются рабочими органами промышленных роботов. Они предназначены для захватывания и удерживания предмета производства или технологи- ческой оснастки. Предметы производства могут иметь различные размеры, форму, массу, что требует применения захватных устройств разного характера. Поэтому захватные устройства относятся к сменным элементам промышленных роботов - оснастке. Промышленные роботы (ПР) могут комплектоваться набором типовых захватных устройств, которые можно применять в зависимости от конкретных требований. Захватные устройства являются важнейшим элементом конструкции ПР. Расширение области применения ПР непосредственно связано с возможностью быстрой переналадки захватных устройств. Гибкость ПР в значительной мере определяется гибкостью захватных устройств, обеспечивающих возможность быстро переналаживаться для захвата различных заготовок (в пределах заданной номенклатуры).
Характеристика захватного устройства
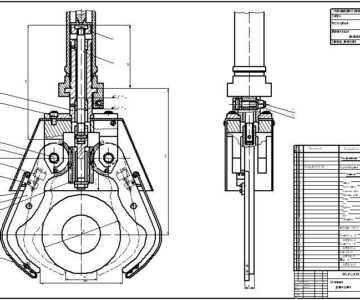
1. Номинальная грузоподъемность - 40кг.
2 .Наибольшее угловое перемещение : относительно продольной оси -180 относительно поперечной оси - 3.5
3. Наибольшая ошибка позиционирования - 0.5mm.
4. Время зажима разжима - 1с
5. Диапазон размеров захватываемых деталей - 100-280 мм
6. Давление пневмоприводов - P=0.5-0.6 МПа


Этот захват не будет работать!
спецификация слабая. а схват сам не плох.
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности