НАЦИОНАЛЬНИЙ АЭРОКОСМИЧЕСКИЙ УНІВЕРСИТЕТ им. Н.Е. ЖУКОВСКОГО «ХАИ»
Кафедра 202 «Детали машин и механизмов»
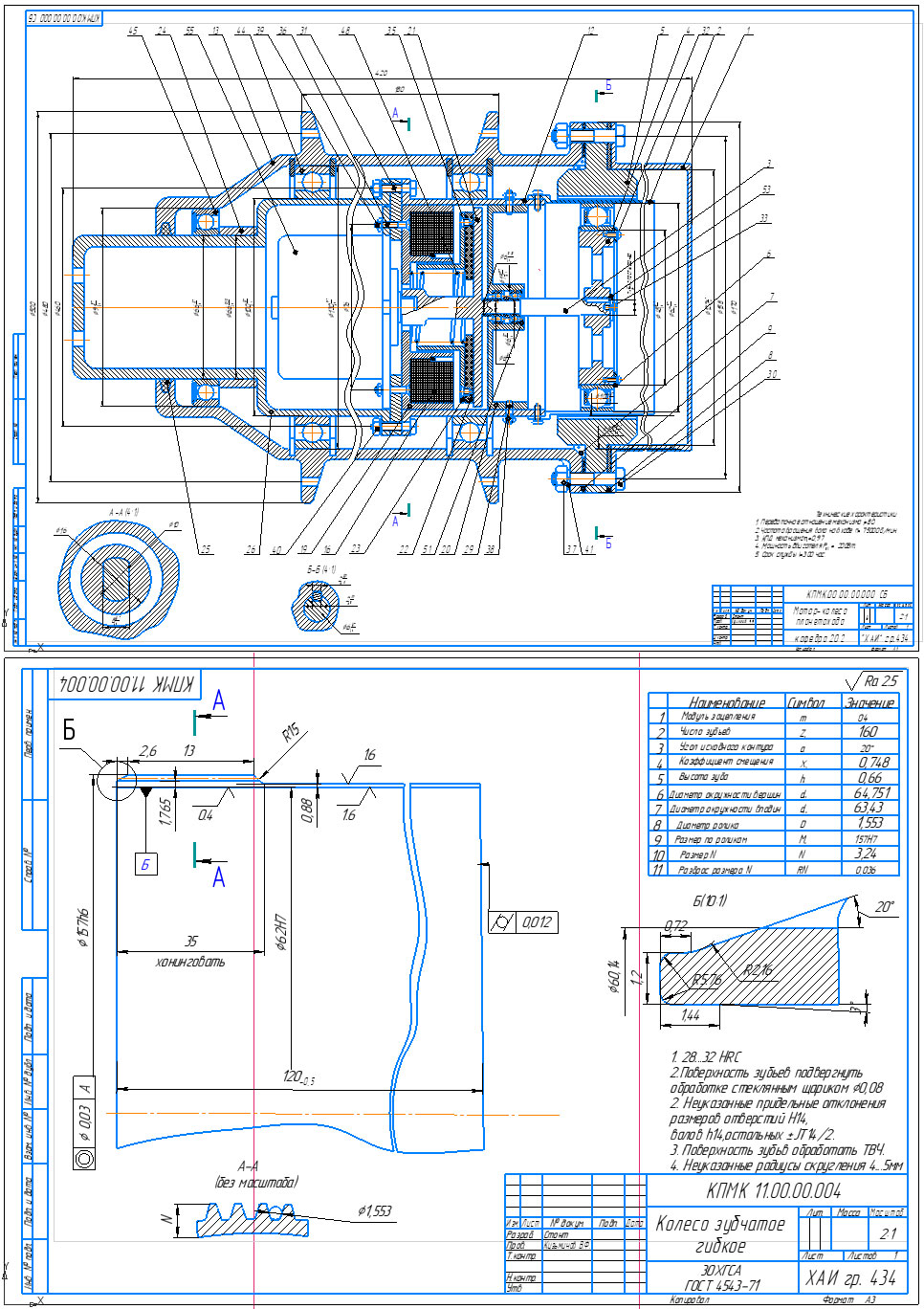
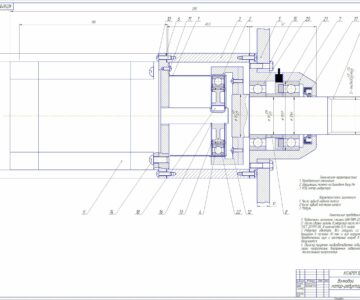
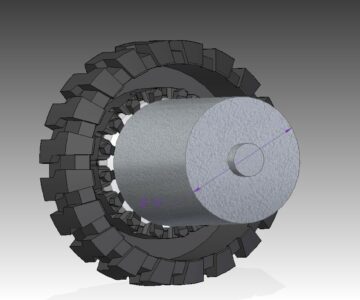
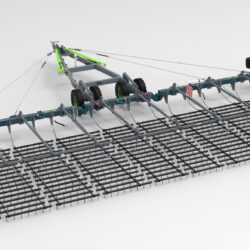
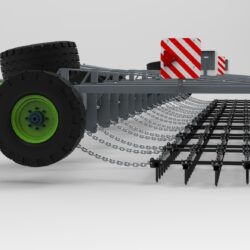
Привод мотор-колеса планетохода
Харьков 2013
Содержание
Введение……………………………………………………………………….3
Перечень условных обозначений, сокращений и символов ……….………..3
1.Кинематический расчет привода…..………………………………………...4
1.1.Подбор электродвигателя…………….……………….……………………6
1.2. Разбивка передаточного отношения…………………….…………………6
2. Расчет волновой передачи………………………………….………………..14
Проектировочный расчет…………………………………….……...….14
Проверочный расчет…………………………………...………………..20
3. Подбор подшипников……………………………………………………….16
4. Болтовое соединени………………………………………………………..17
Заключение…………………………………….…………………….……..17
Литература…………………………………………………………………18
В данной курсовой работе спроектирован привод мотор-колеса планетохода Рассчитанный механизм должен обеспечивать получение на выходе требуемой частоты вращения. Главным критерием расчета и проектирования являлось требование минимизации габаритных размеров и массы изделия.
Привод мотор-колеса планетохода состоит из двигателя, вмонтированного в корпус изделия, и редуктора с волновой передачей.
Волновая зубчатая передача имеет много преимуществ по сравнению с планетарной зубчатой передачей. В первую очередь это масса ВЗП, которая в 1,5 раз меньше ПЗП. Это очень важно для авиационной и космической техники. Вывод в космос лишней масс приводит к удорожанию и неэффективности разработанной передачи, обеспечивающей передвижения космическо-исследовательских аппаратуры. Поэтому главное требование является масс, но не нужно забывать и про габариты. ВЗП удовлетворяет многим требованиям и поэтому применения этого вида передачи перспективно. Вследствие применения кольцевого жесткого колеса по сравнению с чашеобразным значительно смогли уменьшить габариты мотор-колеса. Из-за многопарность зацепления ВЗП лучше ПЗП, но недостаток ВЗП в том, что имеет малую крутильную жесткость.






Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности