ТГАТУ мтф ремонт 2013
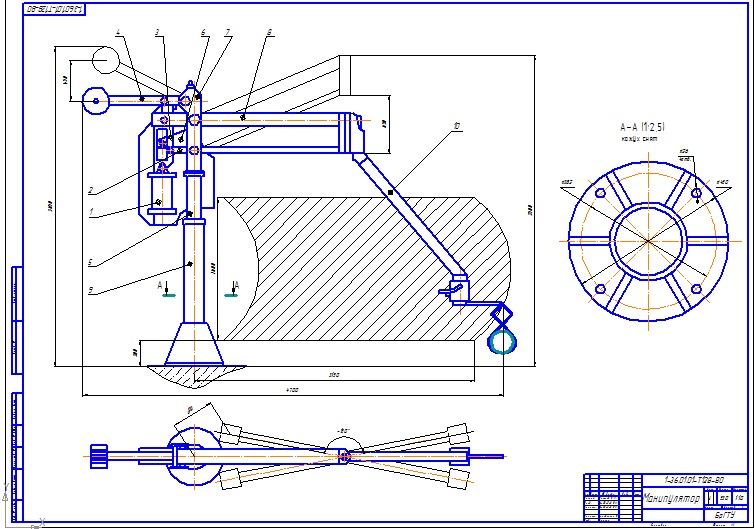
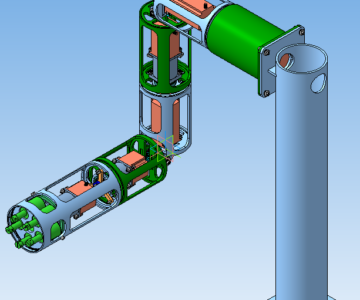
Чертеж со спецификацией и описанием и принципом работы пневмо манипулятора. Манипулятор предназначен для подъёма и перемещения грузов массой до 60 кг. При подключении его к пневмосети стрела и рукоять находятся в состоянии безразличного равновесия в любой точке пространства зоны обслуживания, как с грузом, так и без него. Манипулятор позволяет производить плавную и точную установку деталей на межоперационных передачах при усилии оператора не более 65 Н. конструкция манипулятора дает возможность использовать различные грузозахватные устройства: клещевого типа, захваты с пневмоуправлением, захваты, закрепленные на оси, жесткие захваты, позволяющие транспортировать груз с ориентированным положением, захваты консольно-штырьевого типа. Обеспечивает транспортировку хрупких вещей, таких как стекло, земляные формы.
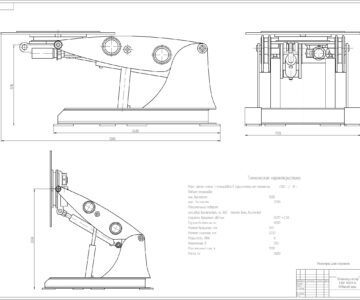
Технические характеристики:
Номинальная грузоподъёмность, кг 60;
Максимальный грузовой момент, Н∙м 400;
Число степеней подвижности 4;
Максимальный радиус обслуживания
по горизонтали, мм, не менее 3150;
Минимальный радиус обслуживания
по горизонтали, мм, не менее 400;
Максимальная высота обслуживания, мм, не менее 1700;
Минимальная высота обслуживания, мм, не менее 200;
Габаритные размеры, мм 4700×580×3750;
Масса, кг, не более 530;
Масса без колонны, кг, не более 425.
Записка два пункта
Разработка и проектирование манипулятора для подъёма детали 2
2.4.1 Назначение манипулятора 2
2.4.2 Устройство и принцип работы 3
Добрый день.
В файле документации 2 страницы. Нет ни схемы, ни чертежей.
Мне казалось что документация содержит полный комплект документов.
Добрый, все верно, тут пояснительная записка не заявлена
А зачем тогда это все? Как это можно использовать ? Перед скачиванием всегда можно сделать запрос на доп. информацию.
Для студенчески работ. в Описании сказано - "Чертеж со спецификацией и описанием и принципом работы пневмо манипулятора."
Добрый день. Мне нужен пневматический манипулятор. Готовы разработать??
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности