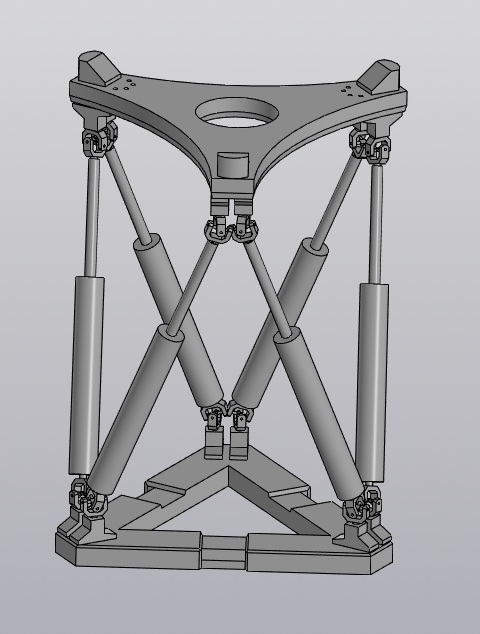
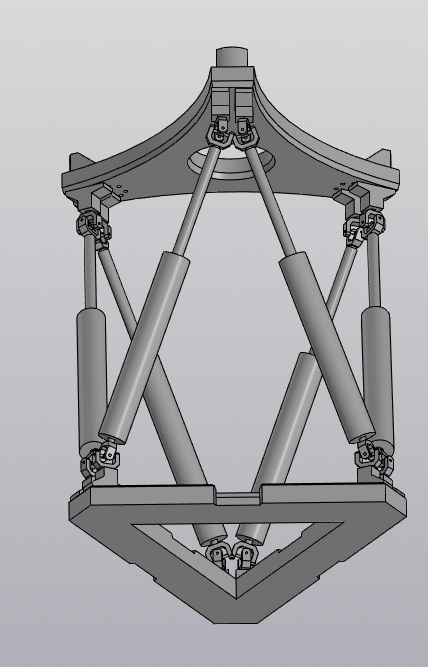
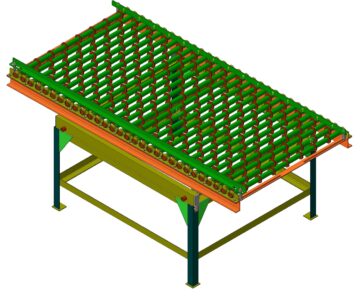
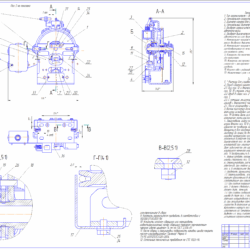
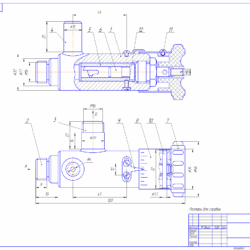
В данной работе представлена твердотельная 3D-модель механизма параллельной кинематики, известного как платформа Гью-Стюарта или гексапод. Суть конструкции заключается в подвижной раме, которая опирается на неподвижное основание через шесть управляемых штанг (актуаторов).
Благодаря такой схеме платформа обретает полную свободу перемещения в пространстве: она может двигаться вперед-назад, вверх-вниз, влево-вправо, а также менять угол наклона по всем осям. Шесть опор сгруппированы по две и шарнирно закреплены в трех угловых точках как на нижней, так и на верхней плите, что в сумме дает 12 подвижных соединений. Хотя в реальных механизмах используют гидравлику, пневматику или электричество, данная сборка отображает только механическую часть в масштабе 1:10.
Где применяются такие решения?
Высокотехнологичные тренажеры (подготовка пилотов и водителей).
Динамические стенды для испытания шин и узлов.
Научное оборудование (от сейсмического моделирования до биомеханики).
Системы точного наведения антенн и зеркал.
Устройства виброзащиты на транспорте.
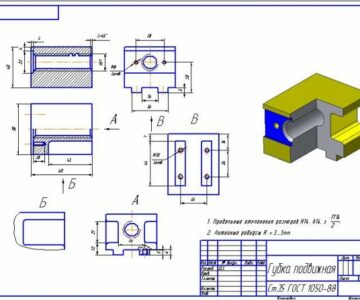
Модель выполнена с высокой детализацией. В файлах сохранена полная история построения каждой детали, что позволяет проследить весь процесс твердотельного моделирования.
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности