Белорусско-Российский университет, Машиностроительный факультет
Курсовая работа по Технологическому оборудованию. Долбёжный станок модели 7А420.
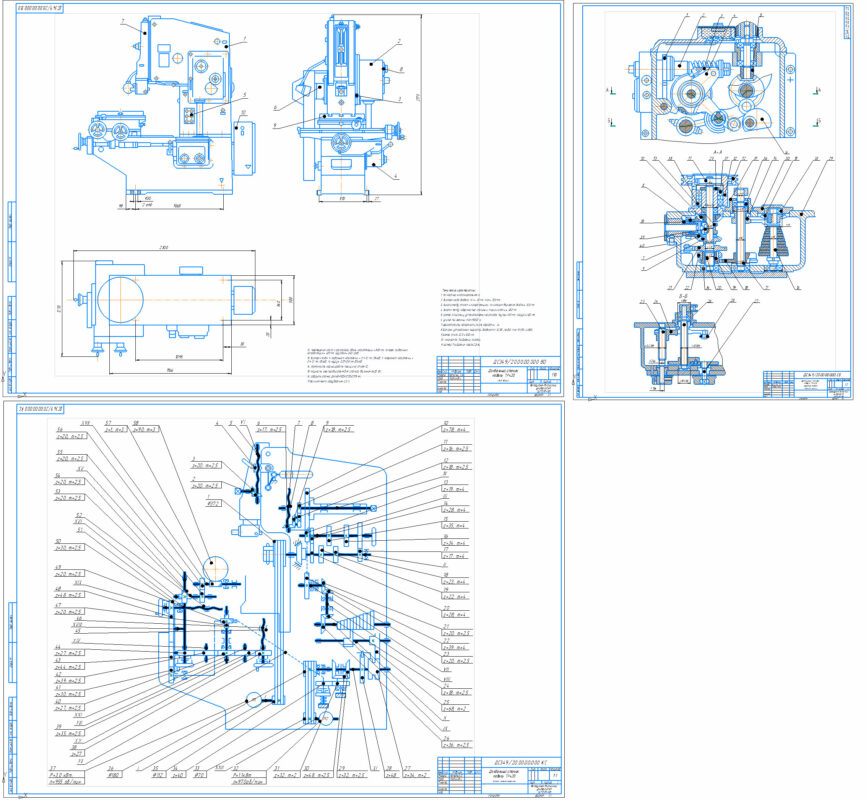
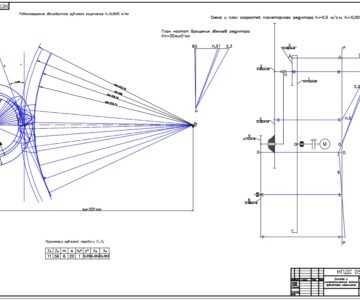
Общий вид станка. Кинематическая схема. Коробка подач. Назначение станка: Долбежный станок 7А420 с механическим приводом пред-назначен для изготовления шпоночных пазов, шлицев и канавок на фасонных и плоских поверхностях в мелкосерийном и единичном производстве, а также в ре-монтных мастерских.
Станок предназначен для обработки долблением плоских и фасонных поверхно-стей, пазов и канавок в разнообразных деталях, а также различных видов штампов, устанавливаемых непосредственно на столе или в приспособлениях. Возможность поворота рамы с долбяком позволяет обрабатывать наклонные плоскости, не ме-няя позиции детали.
Стол перемещается как вручную, так и механически. Круговая подача стола да-ет возможность обрабатывать на станке круглые детали и зубчатые колеса.
1. точностной класс-нормальная Н;
2. диапазон хода долбяка: min = 20 мм; max = 200 мм;
3. высота между столом и направляющими, по которым двигается долбяк = 320 мм;
4. высота между поверхностью станины и торца головки = 450 мм;
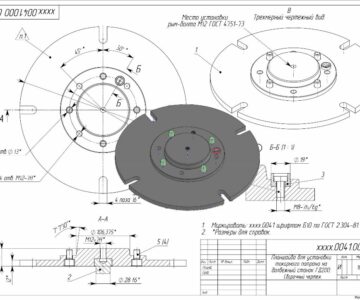
5. размер в высоты у устанавливаемых заготовок: внутри-100 мм; снаружи-300 мм;
6. усилие при резании, max-15000 Н;
7.шероховатость поверхности после обработки: V6;
8.диапазон установочных скоростей долбяка-min 32 дв./ходов, max 101 дв./ходов;
9.размер стола D = 500 мм;
10. количество Т-образных пазов=4;
11. размер Т-образных пазов=22Н14;
12. перемещения стола с заготовкой: вдоль направляющих = 500 мм; поперек продольных направляющих = 400 мм; круговое = 360 град;
13. диапазон подач: в продольном направлении = 0,1-1,2 мм/дв.ход; в поперечном направлении = 0,1-1,2 мм/дв.ход; по кругу = 0,07-0,8 мм/дв.ход;
14. возможность зафиксировать позиции на столе-12;
15. мощность электродвигателя для главного движения-3600 Вт;
16 габариты станка, ДхШхВ-900х1270х2175 мм;
17.вес комплекта оборудования-2,0 т.
Содержание
Введение 3
1. Описание основныx узлов и движений станка 4
2. Разработанные структурные схемы всех приводов 6
станка на основании кинематической схемы 7
3. Анализ возможности реализации основных методов
формообразования поверхностей для станка модели 7А420 11
4. Уравнения кинематического баланса привода главного
движения и подачи для максимального и минимального
значений с определение передаточных отношений 12
5. Описание органов управления 14
6. Виды используемого инструмента 15
7. Приспособления для крепления заготовок 18
8. Мерительный инструмент 20
9.Охрана труда 28
9.1 Требования оxраны труда перед началом работы 28
9.2 Требования оxраны труда во время работы 30
9.3 Требования оxраны труда в аварийныx ситуацияx 35
9.4 Требования оxраны труда по окончанию работы 36
9.5 Мероприятия по оxране окружающей среды 37
Заключение 38
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности