Технология машиностроение
Курсовой проект по дисциплине «Оборудование машиностроительных производств»
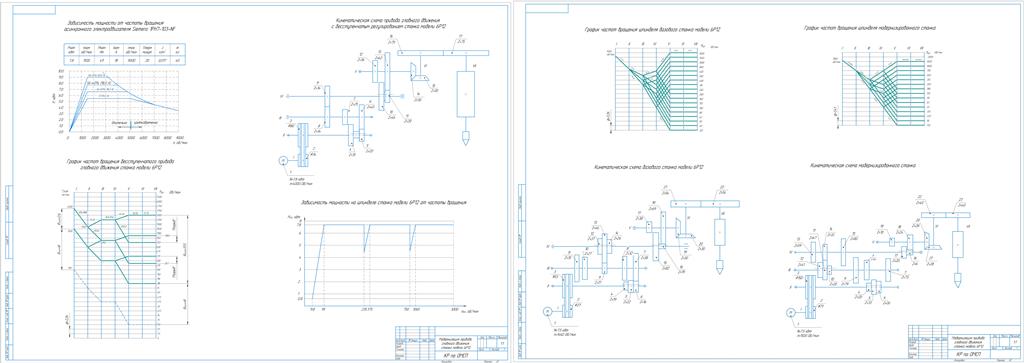
на тему: Модернизация кинематики привода главного движения станка 6Р12
Целью выполнения курсовой работы по дисциплине «Оборудование машиностроительных производств» является модернизация кинематики привода главного движения универсального (базового) станка путем изменения его скоростных характеристик. При этом кинематические характеристики гомогенизируемого привода базового станка не должны уступать подобным параметрам современных станков — аналогов ведущих зарубежных и отечественных фирм.
В курсовой работе разработаны кинематики приводов главного движения как со ступенчатым, так и бесступенчатым регулированием частот вращения шпинделя. Следует отметить, что приводы с плавным (бесступенчатым) регулированием, широко используемые в станках с ЧПУ, все чаще применяются и в универсальных станках общего назначения.
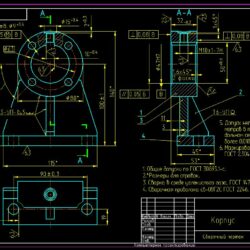
Также, следуя наметившимся тенденциям в практике станкостроения, общим требованием при модернизации являются полное сохранение формы и размеров корпусов узлов базового станка, в которых будут располагаться элементы привода с измененными характеристиками. При разработке кинематики это означает, что компоновка, структура и количество валов в модернизируемом приводе должны остаться такими же, как и в базовом станке.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ.............................................................................................................4
1.ИСХОДНАЯ ИНФОРМАЦИЯ ДЛЯ МОДЕРНИЗАЦИИ ПРИВОДА ГЛАВНОГО ДВИЖЕНИЯ.............................................................................5
1.1. Сведения по базовому станку......................................................................5
1.2. Обзор технических характеристик ….......................................................6
2. ПРИВОДЫ ГЛАВНОГО ДВИЖЕНИЯ СО СТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ СКОРОСТЕЙ........................................................16
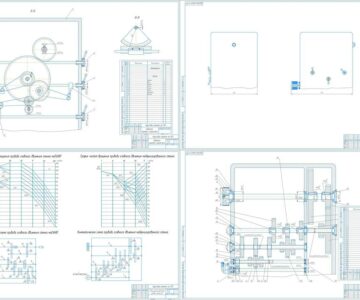
2.1. Построение графика частот вращения..................................................16
2.2. Определение диаметров шкивов и чисел зубьев шестерен................16
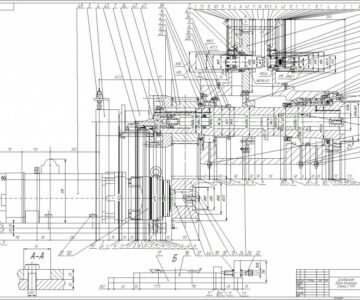
2.3. Разработка кинематической схемы привода.........................................20
3. ПРИВОДЫ ГЛАВНОГО ДВИЖЕНИЯ С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ СКОРОСТЕЙ........................................................22
3.1. Выбор электродвигателя...........................................................................22
3.2. Построение графика частот вращения..................................................23
3.3.Определение чисел зубьев шестерен и построение кинематической схемы......................................................................................................................25
3.4. Построение графика мощности на шпинделе......................................26
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.......................................................29


Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности