УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
«БЕЛОРУССКАЯ ГОСУДАРСТВЕННАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ АКАДЕМИЯ»
Факультет механизации сельского хозяйства
Кафедра теоретической механики и инженерной графики
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине: Теория машин и механизмов
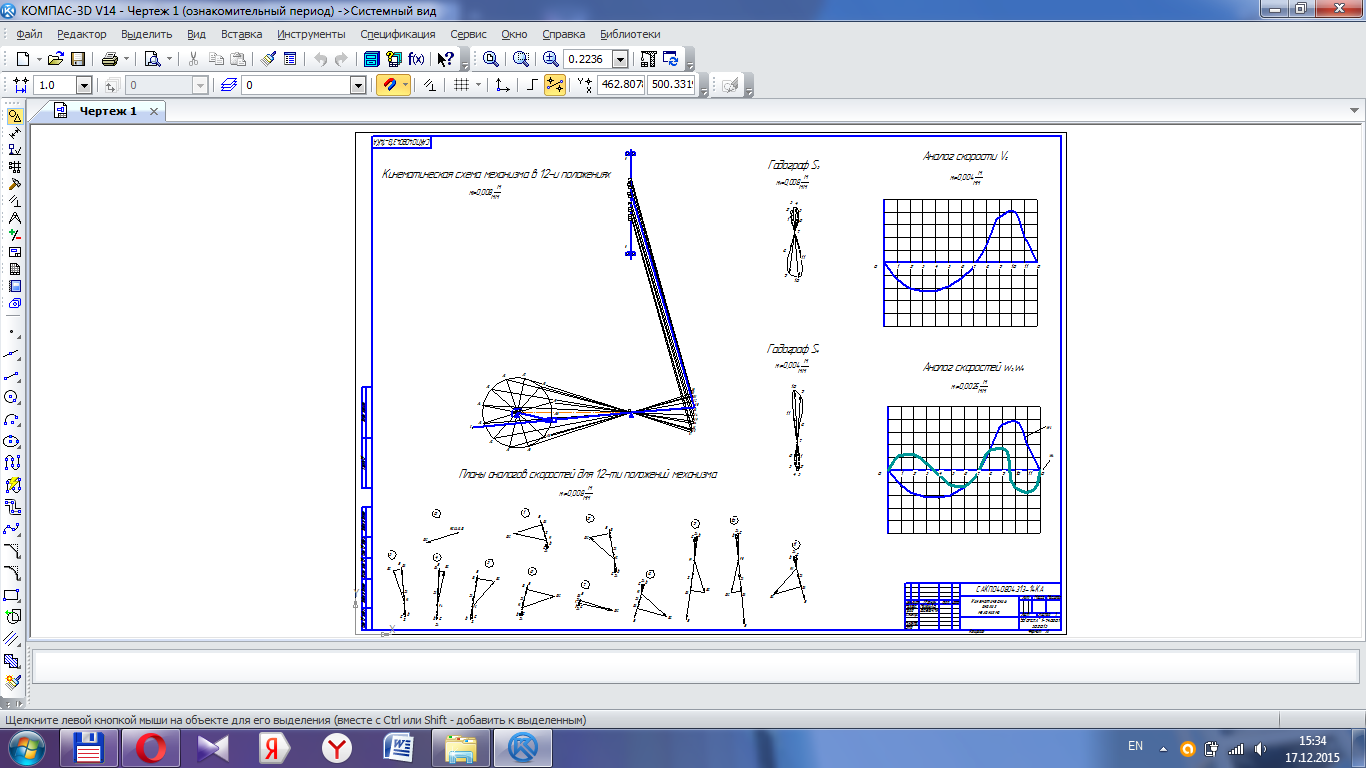
на тему: Расчёт кулисного механизма и привода к нему
Горки 2014
Содержание
Введение…………………………………………………………………………….…………..3
1.Синтез основного рычажного механизма…...…………………………………...……..…4
1.1 Структурный анализ рычажного механизма…………………………………………..4
1.2 Метрический синтез механизма………………………………………………………..6
1.3 Построение схемы механизма………………………………………………………….7
1.4 Построение планов аналогов скоростей……………………………………………….7
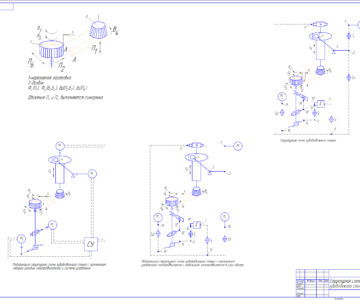
2.Синтез передаточного, зубчатого механизма……………………………………...…….10
2.1 Выбор схемы механизма………………………………………………………………10
2.2 Определение передаточного отношения планетарного механизма………………...10
2.3 Подбор числа зубьев планетарного зубчатого механизма………………………….11
2.4 Определение геометрических параметров зубчатых колёс…………………………12
2.5 Определение геометрических параметров корригированных зубчатых колёс……13
2.6 Определение коэффициента полезного действия зубчатого механизма…………...14
3. Динамическое исследование машинного агрегата………………………………..……15
3.1 Приведение масс……………………………………………………………………….15
3.2 Приведение сил к кривошипному валу………………………………………………17
3.3 Уравнение движения машинного агрегата…………………………………………...19
3.4 Расчёт маховика………………………………………………………………………..22
4. Силовой расчёт рычажного механизма……………………………………………..…..24
4.1 Определение коэффициента потерь…………………………………………………..26
Литература…………………………………………………………………………………….28
Из задания имеем:
Ход исполнительного звена S=400 мм.
Коэффициент изменения средней скорости К=1.5
Максимальный угол давления Υmax=18°
Отношение длин O1O2/ O2B= 1/0,6
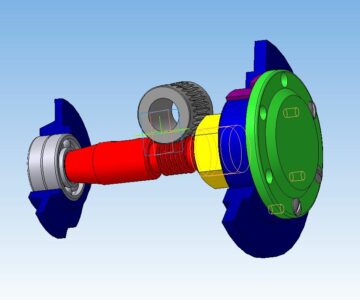
В данном механизме кривошип 1 через муфту, установленную на вал 0, соединяется с выходным валом зубчатого механизма передач. Входной вал зубчатого механизма соеди-нен с электродвигателем. Вращение от двигателя через зубчатый механизм передается на кривошип, который может совершать полный оборот вокруг оси 0. Ползун 2 шарнирно прикрепленный в точке А кривошипа, совершает поступательное движение. Ползун 2 при-водит во вращение коромысло 3, которое в свою очередь через шатун 4 приводит в движе-ние кулису. Кулиса 5 совершает поступательное движение и выполняют заданный технологический процесс



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности