
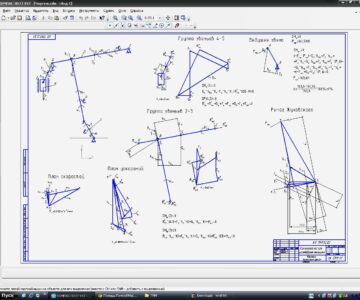
Тема проекта «Механизм пресс-автомата». В проекте представлены записка со всеми необходимыми расчетами, 2 листа А1, один лист А2
Пресс автомат предназначен для получения изделий методом выдавливания.
От электродвигателя I движение через планетарный редуктор II и зубчатую передачу Z5-Z6 передается на кривошипный вал О1 кулисного механизма III.
Кривошип I жестко соединен с зубчатым колесом 6. Во время перебегов в конце холостого и в начале рабочего ходов осуществляется подача с помощью храпового механизма и кулачкового механизма, кулачок которого жестко соединен с зубчатым колесом 5.
Длина хода ползуна H мм 260
Коэффициент изменения скорости к - 1,5
Отношение длин /BO2
- 0,3
Отношение длин BC/BO2 - 3,5
Сила резания Q H 9000
Содержание
Исходные данные 2
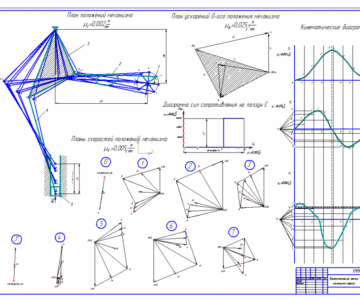
1 Динамический синтез рычажного механизма 3
1.1 Цели и задачт первого листа 3
1.2 Задачи динамического синтеза рычажных механизмов 4
1.3 Структурный анализ механизма 6
1.4 Метрический синтез рычажного механизма 8
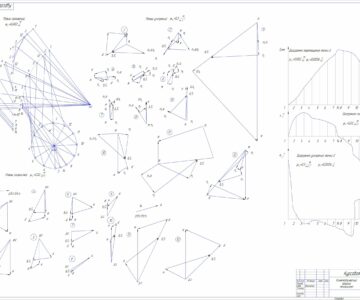
1.5 Построение 12 планов положения механизма 10
1.6 Построение 12 повернутых планов скоростей 10
1.7. Описание динамической модели машинного агрегата. Определение приведенных сил и моментов сопротивления. 13
1.8. Определение приведенной силы сопротивления приведенного момента сопротивления 14
1.10 Построение графиков 17
1.11 Определение избыточной работы механизма и момента инерции маховика 18
1.12 Определение положения максимальной нагрузки машинного агрегата 19
1.13 Определение углового ускорения 19
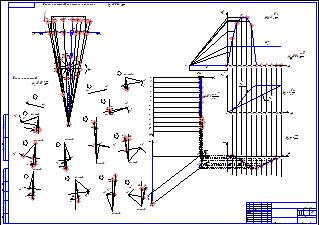
2 Динамический анализ рычажного механизма 20
2.1 Задачи второго листа 20
2.2 Построения плана ускорения рычажного механизма 20
2.3 Определение инерционной нагрузки звеньев 22
2.4 Силовой анализ методом планов сил 23
2.4.1 Диада 4-5 24
2.4.2 Звено 3 – кулиса 24
2.4.3 Силовой анализ кривошипа. Определение уравновешивающей силы и уравновешивающего момента 25
2.5 Силовой анализ методом Жуковского 25
2.6 Потери мощности на трение в кинематических парах 27
2.7 Определение мгновенной полезной мощности на входном звене и мощность электродвигателя для привода механизма 28
3 Синтез и анализ зубчатой передачи и планетарного редуктора 29
3.1 Цели и задачи третьего листа 29
3.2 Классификация зубчатых механизмов с неподвижными осями, основные теоремы зацепления 29
3.3 Геометрический расчет цилиндрической зубчатой передачи 30
3.4 Проектирование эвольвентного зацепления 32
3.5 Построение зубчатого зацепления, определение активных профилей зубьев, определение активной линии зацепления и коэффициент торцового перекрытия аналитическим и графическим способами 33
3.6 Методы нарезания эвольвентных профилей зубьев 34
3.7 Определение общего передаточного отношения заданного привода, а также планетарной ступени и зубчатого ряда механизма 35
3.8 Построение плана линейных скоростей 38
3.9 Построение плана частот вращения зубчатых колес; Определение частот вращения зубчатых колес аналитическим методом 38
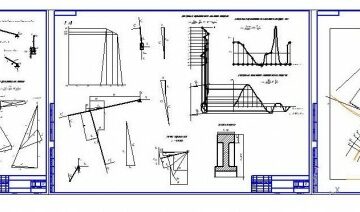
4. Синтез и анализ кулачкового механизма 39
4.1 Задачи и синтез кулачкового механизма 39
4.2 Построение 6-ти кинематических графиков по заданному закону движения толкателю 40
4.3 Определение масштабных коэффициентов графиков 41
4.4 Определение минимального радиуса кулачка 42
4.5 Построение профиля кулачка 43
4.6 Построение графиков зависимости углов давления 43
Список использованных источников 44
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности