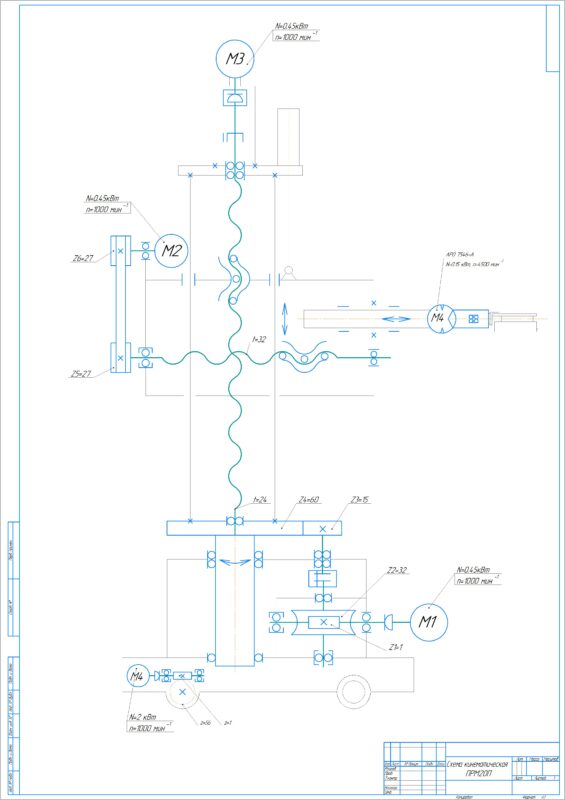
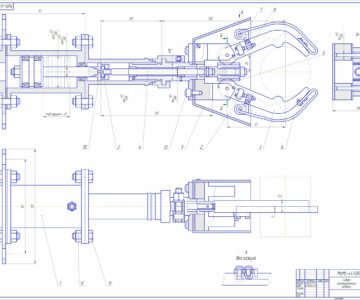
Схема кинематическая промышленного робота ПРМ20П.
предназначенный для выполнения двигательных и управляющих функций в производственном процессе манипуляционный робот, т. е. автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций[
- Главная -
- Чертежи -
- Схемы -
- Кинематические схемы -
- Схема кинематическая промышленного робота ПРМ20П
Схема кинематическая промышленного робота ПРМ20П
1
2
993
3
0
30
Сообщить о проблеме
Автор
Дата
08.03.2019
Язык
Русский
Состав
Кинематическая схема
Софт
КОМПАС-3D 17.1
Как открыть?
Отзывов пока нет
Содержимое архива
-
 Схема кинематическая ПРМ20П.cdw
Схема кинематическая ПРМ20П.cdw
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:

Задания с фриланса
Требуется выбрать электродвигатель и выполнить кинематический расчет привода, при этом рассчитать
договорная
10.06.2026
20.06.2026



Отзывов пока нет
Чтобы оставить отзыв, необходимо войти
Войти с помощью:
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности