МОСКОВСКИЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (МАДИ)
Кафедра тягачей и амфибийных машин
Курсовой проект по дисциплине: "Теория специальных транспортных средств (Теория СТС)"
На тему: "Расчет маневренных качеств полуприцепного автопоезда"
Москва 2015
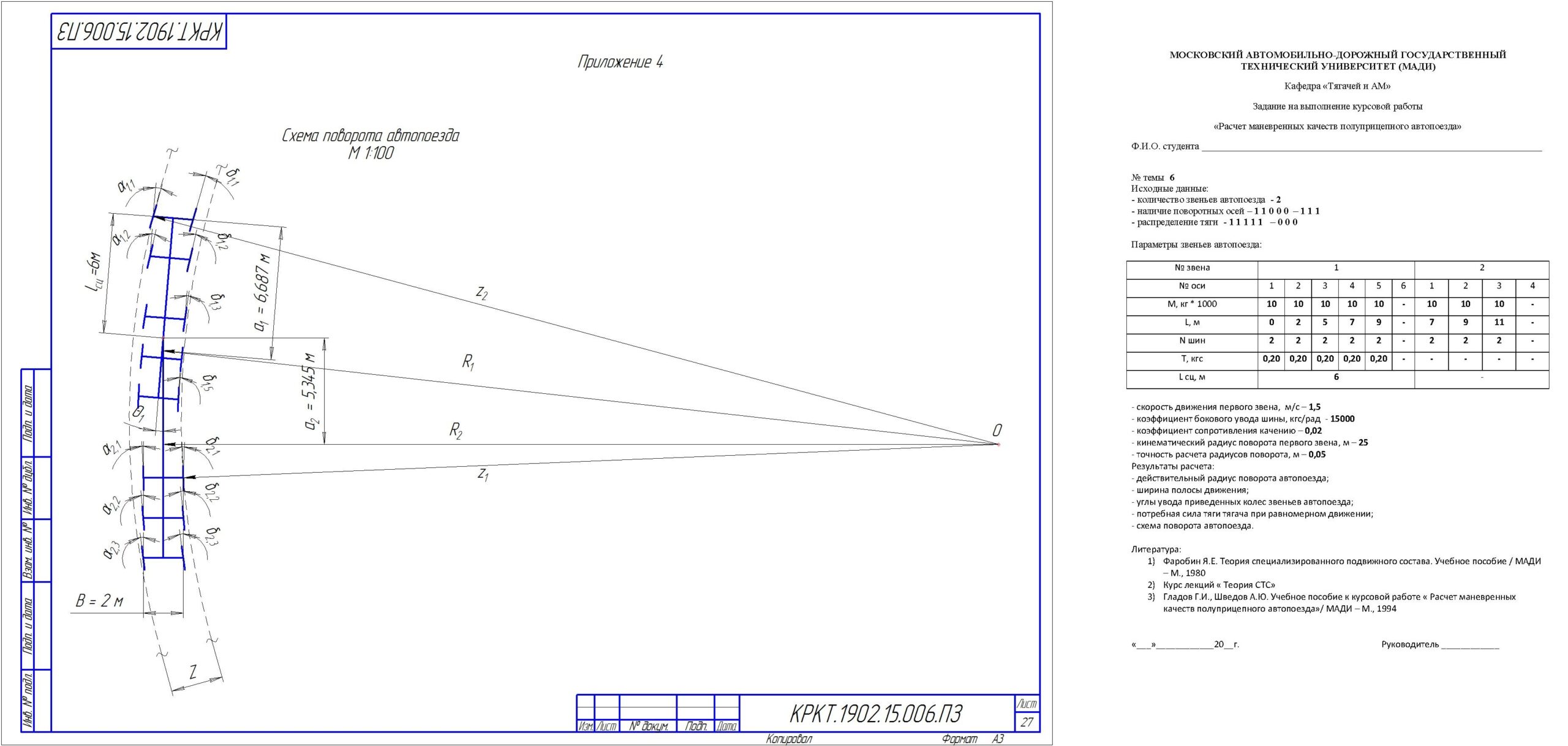
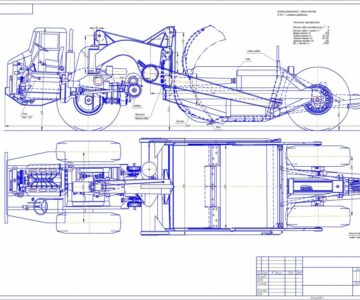
При проектировании рулевого управления полуприцепного автопоезда одним из основных требований является его вписываемость в полосу движения определенной ширины и радиуса. Причем радиус в данном случае принимается постоянным, т.е. рассматривается только круговая часть поворота.
Содержание данной курсовой работы составляет расчет параметров маневренности автопоезда, состоящего из тягача и полуприцепного звена с ведомыми и управляемыми колесами. Под параметрами маневренности понимаются радиус поворота, ширина полосы движения и сила тяги, требуемая для поворота автопоезда.
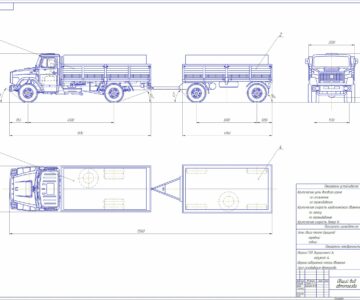
Расчёт проводим на автопоезде, где тягач (10х10) имеет первые две оси с управляемыми колесами, и полуприцеп со всеми ведомыми и управляемыми колесами.
Курсовой проект содержит 1 лист формата А3 со схемой поворота атопоезда (Приложение 4) и 28 страниц пояснительной записки, содержащей 3 графических приложения и 3 источника.
ТТХ автопоезда полностью написаны в задании к курсовой работе и в пояснительной записке в разделе Исходные данные.
R = 25 м - кинематический радиус поворота первого звена;
R = 35 м - гостируемый радиус поворота;
Mij = M11 = M12 = M13 = M14 = M15 = M21 = M22 = M23 = 10 т - нагрузка на каждую ось автопоезда;
l = 6 м - расстояние от первой оси до точки сцепки тягача;
k = 15000 кгс/рад - коэффициент бокового увода шины;
υ = 1,5 м/с - скорость тягача;
f = 0,02 - коэффициент сопротивления качению;
R = f * Mji - сила сопротивления качению (Принимаем).
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности