Московский Государственный Университет Путей Сообщения, 2014
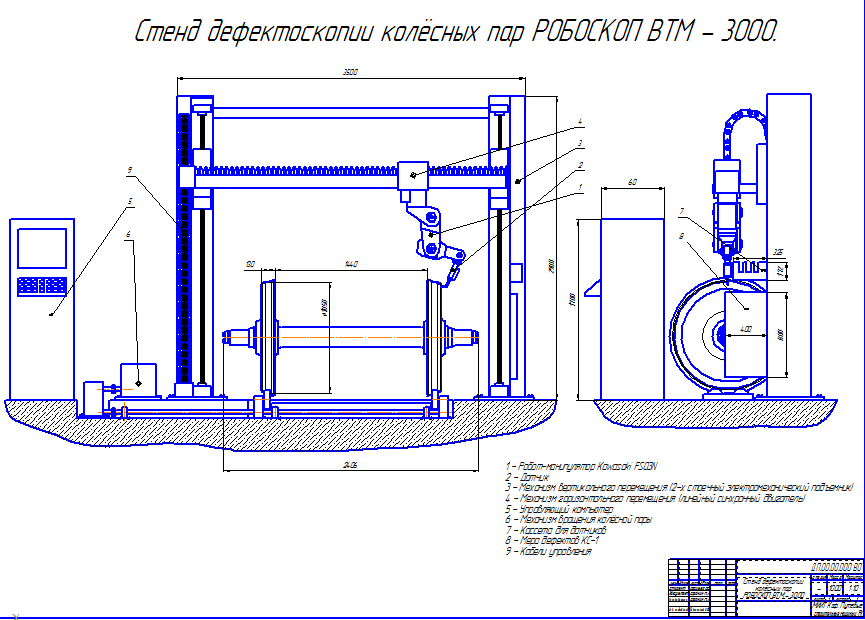
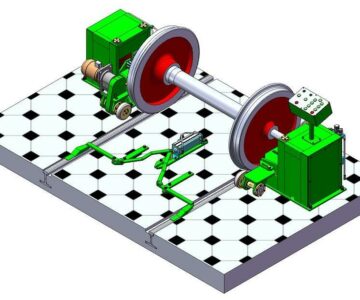
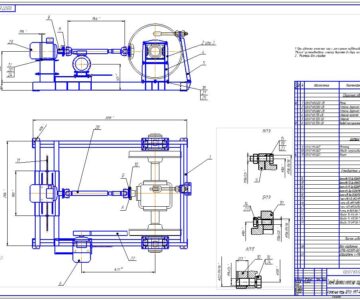
1 - Робот-манипулятор Kawasaki FS03N
2 - Датчик
3 - Механизм вертикального перемещения (2-х стоечный электромеханический подъемник)
4 - Механизм горизонтального перемещения (линейный синхронный двигатель)
5 - Управляющий компьютер
6 - Механизм вращения колёсной пары
7 - Кассета для датчиков
8 - Мера дефектов КС-1
9 - Кабели управления


Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности