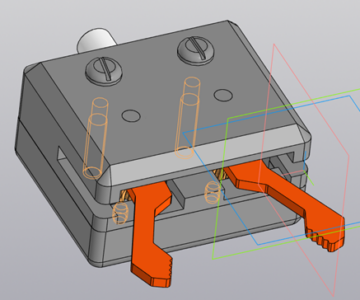
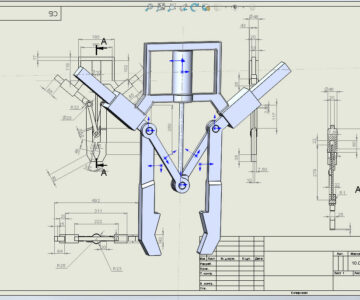
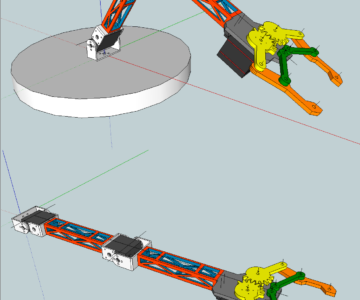
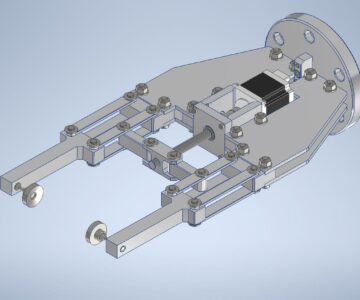
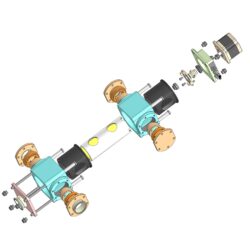
Комплексный проект по разработке и автоматизации системы управления двухпальцевым захватом промышленного робота. Является учебным проектом в УО "Витебский государственный технологический университет". Работа включает в себя весь цикл проектирования: от структурного анализа и алгоритмизации до выбора элементной базы и составления структурной, функциональной, электрических схем.
Программное обеспечение (логика управления) разработано на языке CFC (Continuous Function Chart), соответствующем международному стандарту МЭК 61131-3, в среде CoDeSys V2.3.
- Главная -
- Чертежи -
- Автоматизация и КИП -
- Автоматизация двухпальцевого захвата
Автоматизация двухпальцевого захвата
0
0
23
0
0
100
автоматический захват
для робототехники.
Захватное устройство
Робототехника
Схват робота
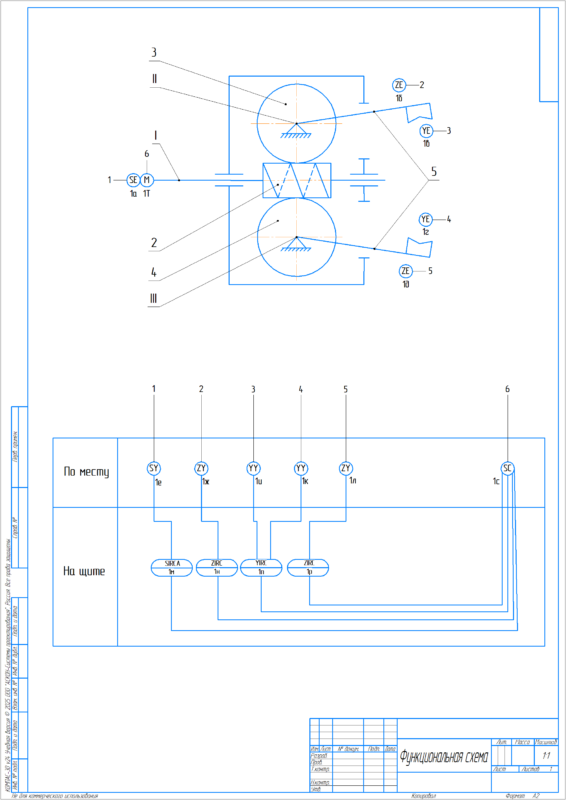
функциональная схема автоматизации
функциональная схема.
Сообщить о проблеме
Автор
Дата
05.07.2026
Язык
Русский
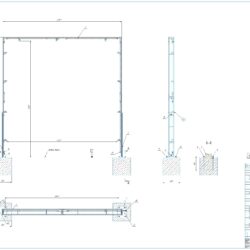
Состав
Алгоритм, Кинематическая схема, Структурная схема, Функциональная схема, Электрическая схема, Программное обеспечение, Оформленный подбор элементной базы
Софт
КОМПАС-3D 24
Как открыть?
Отзывов пока нет
Содержимое архива
-
-
 DEFAULT.DFR
DEFAULT.DFR
-
 Алгоритм.cdw
Алгоритм.cdw
-
Двухпальцевый схват.pro
-
Кинематическая схема.cdw
-
 Программная часть.docx
Программная часть.docx
-
 Программная часть.pdf
Программная часть.pdf
-
Разработка системы автоматического управления мехатронной системы.docx
-
Разработка системы автоматического управления мехатронной системы.pdf
-
Структурная схема.cdw
-
Функциональная схема.cdw
-
Электрическая схема(23).cdw
-
 электрическая схема (1).spl8
электрическая схема (1).spl8
-
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:
Отзывов пока нет
Чтобы оставить отзыв, необходимо войти
Войти с помощью:
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности