Белорусский государственный технологический университет
Кафедра автоматизации производственных процессов и электротехники
Курсовой проект по дисциплине "Автоматизированный электропривод отрасли"
На тему "Автоматизированный электропривод роликового конвейера"
Минск 2019
Исходные данные: скорость движения груза - 30 м/мин, шаг расположения грузов на конвейере -0,2 м, масса одного груза - 0,5 кг.
Целью выполнения курсового проекта является разработка автоматизированного электропривода для роликового конвейера.
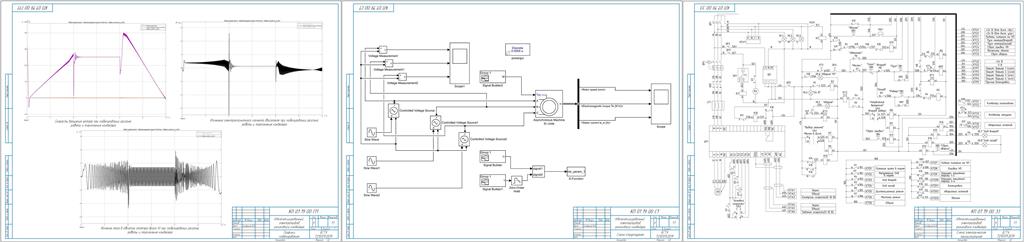
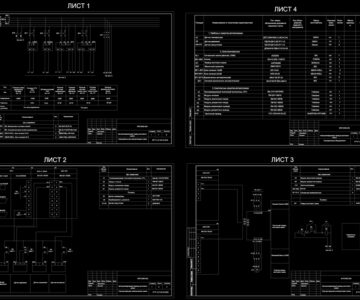
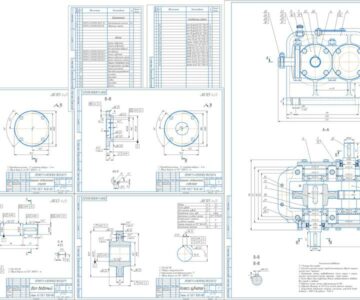
Произведен выбор структурной схемы системы управления и расчет статических характеристик роликового конвейера. Рассчитана и построена нагрузочная и скоростная диаграмма электропривода. Произведена проверка двигателя на пригодность к использованию в составе электропривода. Обоснован алгоритм взаимодействия частотного преобразователя с электродвигателем и роликовым конвейером. Промоделирована работа электропривода в составе системы управления. Выбрана периферия и прикладное программное обеспечение частотного преобразователя для обеспечения его работы в составе электропривода роликового конвейера. Подобраны силовые элементы коммутации и защиты для частотного преобразователя.
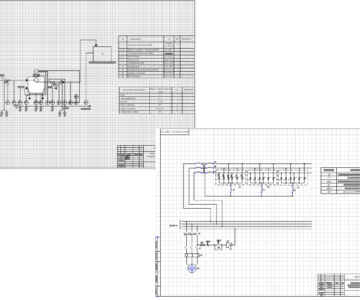
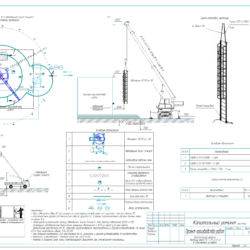
Перечень графического материала:
– Принципиальная электрическая схема – 1 лист формата А2
– Структурная схема – 1 лист формата А2
– Графики моделирования – 1 лист формата А2
Содержание
Введение
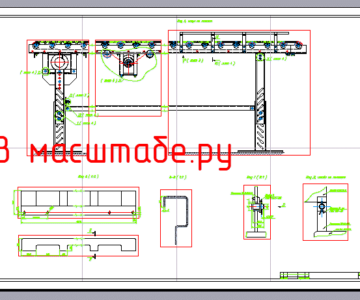
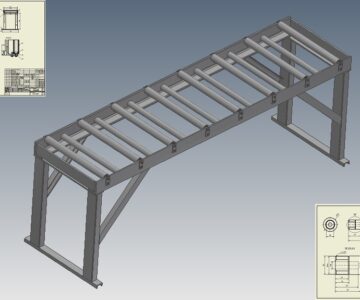
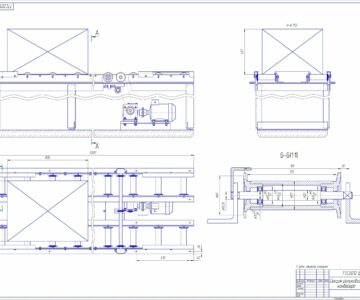
1. Описание технологических особенностей механизма, его технические характеристики и кинематическая схема. Формирование требований к ЭП. Предварительный выбор системы управления электроприводом.
Выбор структуры схемы
2. Расчет статических характеристик и построение скоростной диаграммы механизма за цикл работы. Предварительный выбор электропривода
3. Расчет и построение приближенной нагрузочной и скоростной
диаграммы электропривода. Проверка двигателя по нагреву, пусковой и нагрузочной способностям.
4. Обзор линейки оборудования производителя частотного привода
5. Обоснование алгоритма взаимодействия «объект управления – электродвигатель – частотный преобразователь” и выбор ПЧ. Выбор периферии для ПЧ выполнения задачи управления. Связь с ПЛК, ПК,
системы контроля температуры двигателя, частоты и другой периферии.
Выбор способа установки в или вне щита. Разработка принципиальной электрической схемы
6. Расчет недостающих параметров электродвигателя и построение
механической характеристики в предполагаемых зонах работы
7. Моделирование работы электропривода в составе системы управления
8. Выбор состава периферии ПЧ для обеспечения условий торможения, электромагнитной совместимости, работы электродвигателя в условиях коммутации. Обоснование и выбор несущей частоты
9. Основные пункты меню ПЧ и прикладного ПО для ПЧ для обеспечения функционирования технологического объекта
10. Подбор силовых элементов коммутации и защиты для одного из ПЧ
Заключение
Список использованных источников
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности