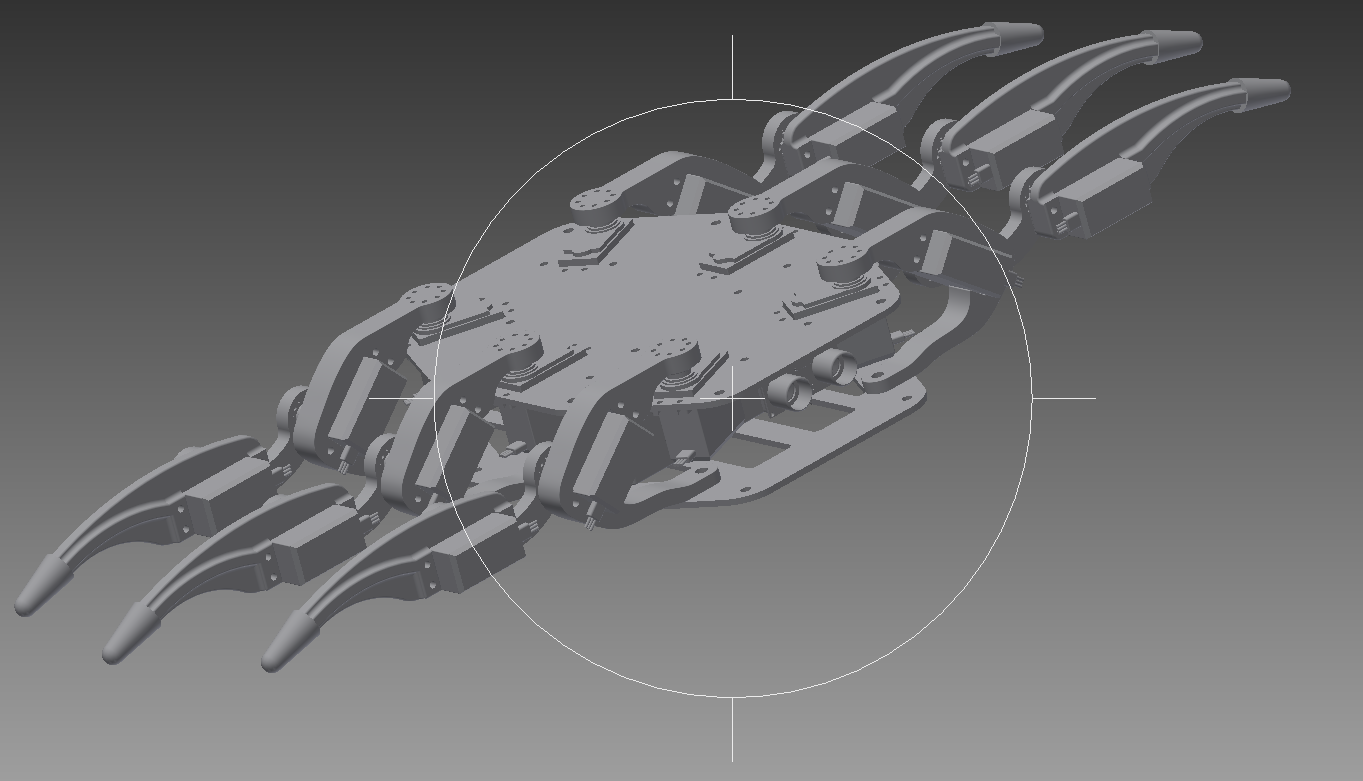
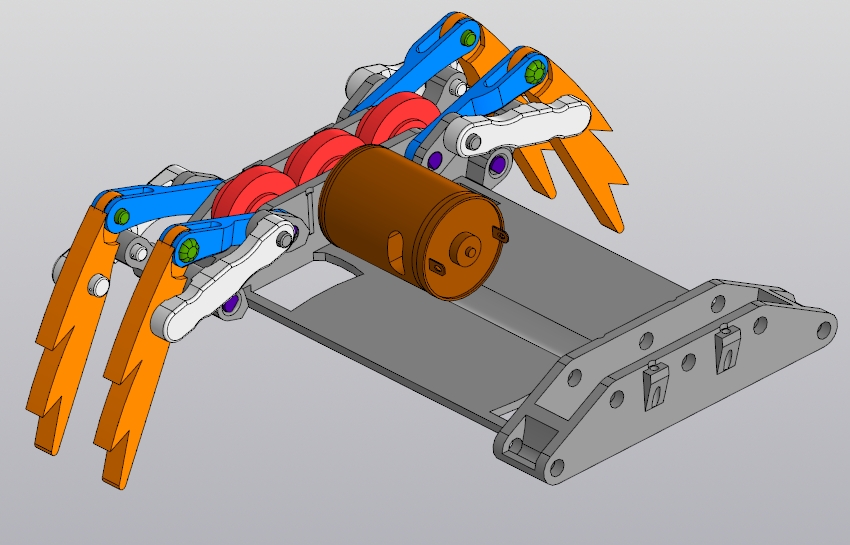
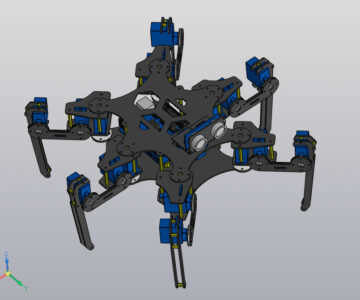
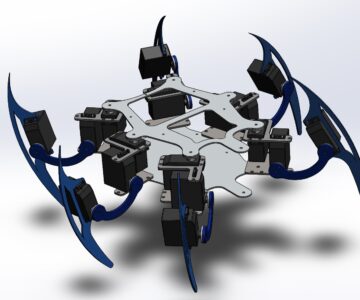
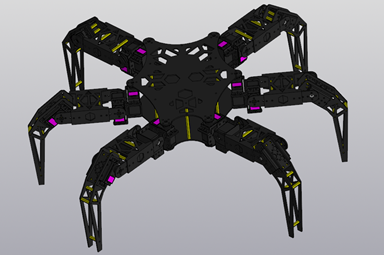
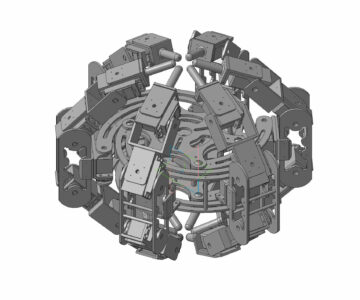
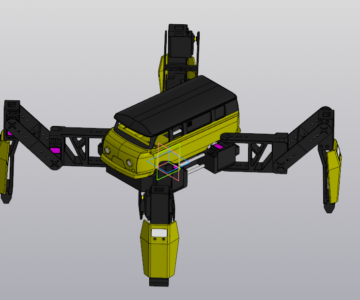
Шестиногий паукообразный робот,имеющий по 3 степени подвижности на каждой из конечностей
- Главная -
- Чертежи -
- Автоматизация и КИП -
- Проект шагающей части робота паука
Проект шагающей части робота паука
0
263
14422
3
0
30
Сообщить о проблеме
Автор
Дата
13.03.2015
Язык
Русский
Состав
3d сборка
Софт
STEP / IGES 2011
Отзывов пока нет
Содержимое архива
-
 Project_Archon.step
Project_Archon.step
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:



Отзывов пока нет
Чтобы оставить отзыв, необходимо войти
Войти с помощью:
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности