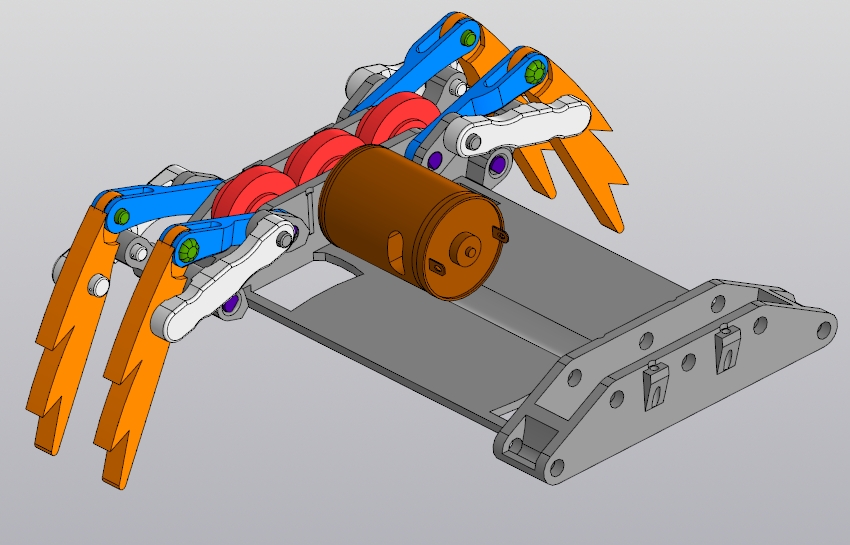
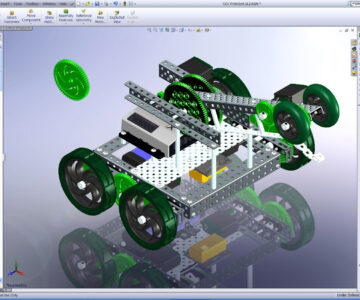
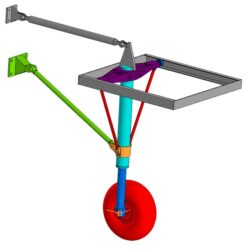
Модель шагающего робота была разработана на соревнования но так и не была закончена (требует доработки). Шагающий механизм разработан, опираясь на механизм Кланна, производилась симуляция в Linkage, модель идеально работает, параметры расположения (расстояния между осями) осей лучше не изменять, можно только масштабировать механизм целиком.
Из недоработок стоит отметить самые важные: редуктор выполнен впритык к корпусу, если собираетесь печатать, сделайте зазоры в 0,5мм и все встанет отлично. Также измените эскиз самой ноги - на прототипе она слегка задевала корпус. Эскиз ноги следует выполнить по дуге наружу от корпуса.
Колеса редуктора - зубчатые колеса от конструктора Tetrix. Модель повторяет только внешний диаметр колеса по зубцам (тупо замеряли штангенциркулем). Зацепление идет на величину в 1,5мм от окружности внутрь модели (впрочем, на модели это отображено). На прототипе колеса встали отлично. В интернете есть большой архив с деталями конструктора Tetrix.
Все детали проектировались под печать на 3д принтере, однако они мелкие, так что печатать механизм ноги лучше высотой слоя в 0,1 - 0,15мм.
Для тех кому нужен ТОЛЬКО МЕХАНИЗМ следует брать сборки InsideFoot и OutsideFoot.
- Главная -
- Чертежи -
- Моделизм, хобби, своими руками -
- Модель шагающего робота
Модель шагающего робота
0
4
356
2
0
50
Сообщить о проблеме
Автор
Дата
24.01.2025
Язык
Русский
Состав
Сборки, модели деталей, наброски
Софт
КОМПАС-3D 18.01
Как открыть?
Отзывов пока нет
Содержимое архива
-
 InsideFoot.a3d
InsideFoot.a3d
-
Main.a3d
-
 Motor 540_12V.m3d
Motor 540_12V.m3d
-
OutsideFoot.a3d
-
 StepperRobot.frw
StepperRobot.frw
-
tempAssemble.a3d
-
Tetrix_big_tooth_wheel.m3d
-
Tetrix_small_tooth_wheel.m3d
-
База.m3d
-
Вал_6_40.m3d
-
Вал_6_80.m3d
-
Вал_коромысло_нога.m3d
-
Деталь _ Кривошип ноги.m3d
-
Крышка редуктора.m3d
-
втулка_ллатун_длинн.m3d
-
втулка_ллатун_коротк.m3d
-
коромысло ноги.m3d
-
кривошип коромысла.m3d
-
кривошип ноги.m3d
-
кривошип ноги_новый_зеркальный.m3d
-
кривошип ноги_ноывй.m3d
-
кривошип привода.m3d
-
нейлоновая вставка большая.m3d
-
нейлоновая вставка маленькая.m3d
-
нога.m3d
-
подсборка.a3d
-
прикидка кинематики.frw
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:
Отзывов пока нет
Чтобы оставить отзыв, необходимо войти
Войти с помощью:
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности