Белорусско-Российский университет
Кафедра Электропривод и автоматизация
Курсовой проект по дисциплине
«Микропроцессорные системы в АЭП»
Тема работы:
« Разработка микропроцессорного устройства для измерения положения»
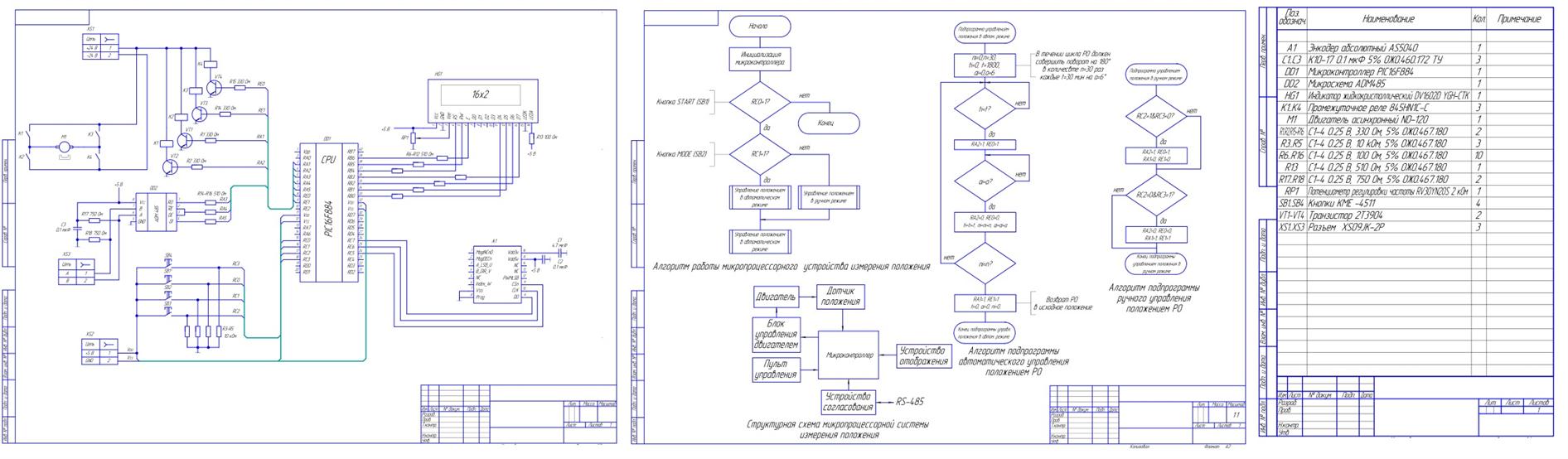
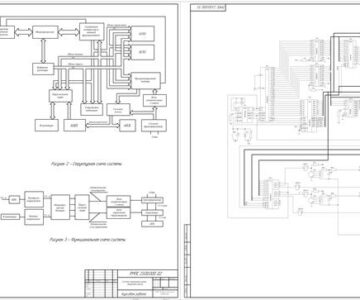
В работе представлен вариант исполнения микропроцессорной системы для измерения положения. В качестве микроконтроллера используется PIC16F884. Для измерения положения использован однооборотный магнитный энкодер AS5040. Информация об угле поворота отображается на жидкокристаллическом дисплее DV1602D YGH.
1.1 Описание принципа устройства
При конструировании систем с подвижными элементами, будь то робот или станок на производстве, встает вопрос о контроле положения движущихся частей. Для таких целей используют валкодеры (их еще называют энкодеры, датчики положения).
Энкодер или датчик преобразования угла – это прибор, предназначенный для трансформации угла поворота вращающегося предмета (вала) в электрические сигналы, которые позволяют установить угол его поворота. В рамках данного курсового проекта для измерения положения будем использовать абсолютный энкодер.
Энкодеры разделяются на инкрементальные и абсолютные, достигающие крайне высокого разрешения.
Абсолютный энкодер принадлежит к виду энкодеров, выполняющий уникальный код для каждой позиции вала. Для конкретной позиции вала формируется уникальный двоичный код каждой дорожкой. Формирование сигнала абсолютным энкодером происходит как во время вращения, так и в режиме покоя.
Измерительная система абсолютного энкодера состоит из поворотной оси, монтированной на двух высокопрецизионных подшипниках, кодового диска, установленного на ось, а также оптоэлектронной считывающей матрицы и схемы обработки сигнала. В качестве источника света служит светодиод, инфракрасные лучи которого просвечивают кодовый диск и попадают на фототранзисторную матрицу, расположенную с обратной стороны кодового диска. При каждом шаге углового положения кодового диска темные участки кода предотвращают попадание света на те или иные фототранзисторы фототранзисторной матрицы. Таким образом, темные – светлые участки каждой из дорожек будут отображены на фототранзисторной матрице и преобразованы в электрические сигналы.
Введение
1 Разработка структурной схемы устройства
1.1 Описание принципа устройства
1.2 Описание структурной схемы устройства
2 Разработка аппаратной части
2.1 Краткое описание микроконтроллера
2.2 Описание периферийных устройств
2.3 Дополнительные устройства
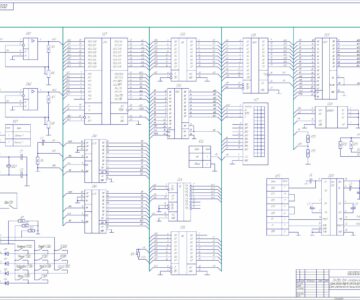
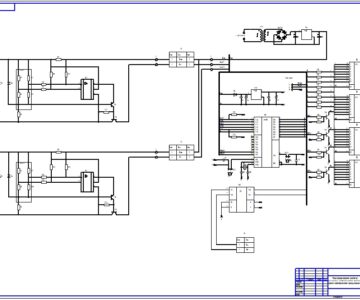
2.4 Описание схемы электрической принципиальной
3 Разработка программного обеспечения
3.1 Описание системы команд
3.2 Описание алгоритма
Заключение
Список используемой литературы
Приложение А. Распечатка текста программы

Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности