Белорусско-Российский университет
Кафедра технология машиностроения
Могилев 2011
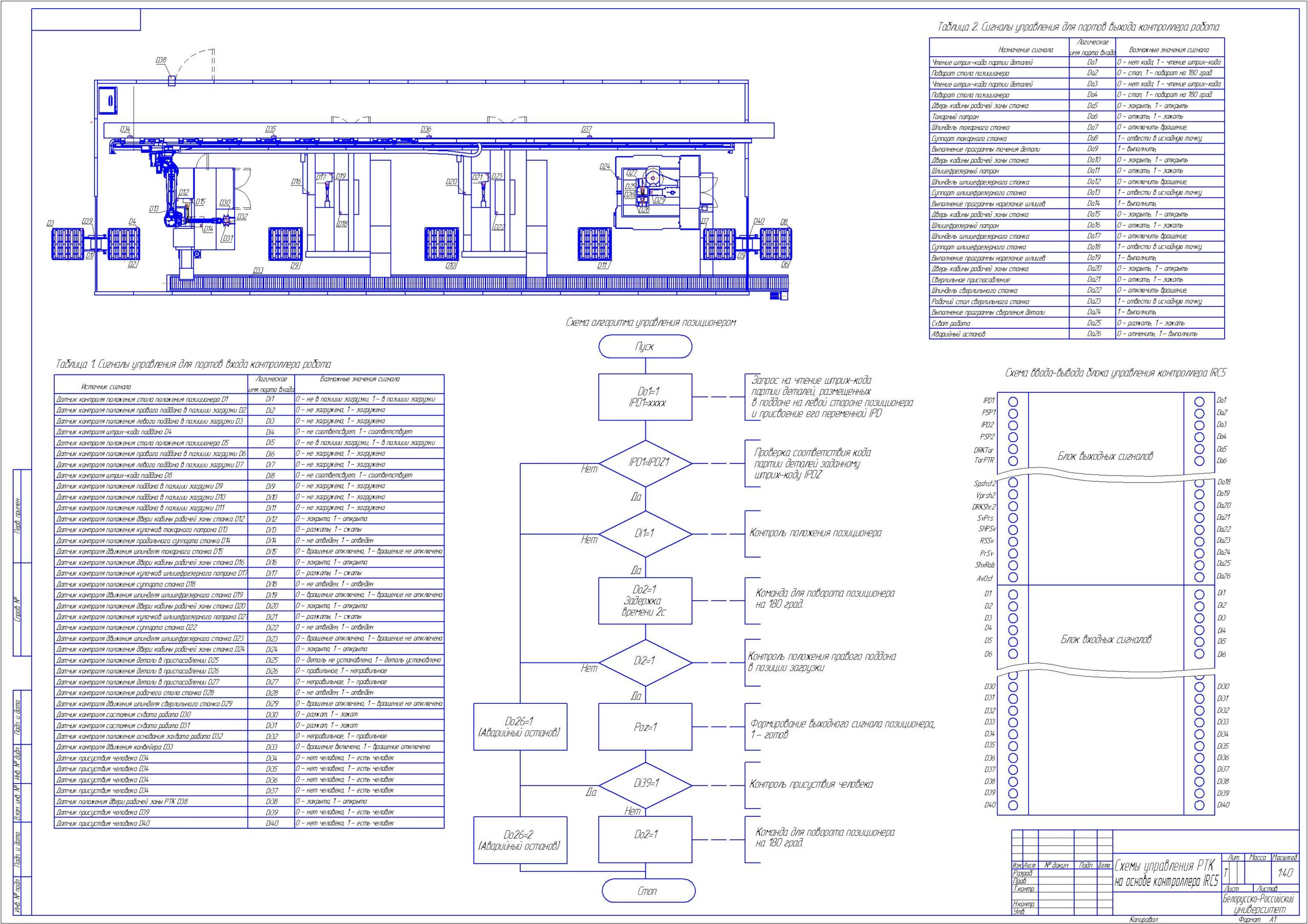
В данной схеме представленн алгоритм управления робототехническим комплексом на основе контроллера IRC5. Подробно разобраны какие датчики подключены на каждый порт входа и выхода контроллера, а также их место нахождение.




Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности