Белорусский государственный университет информатики и радиоэлектроники.
Кафедра систем управления.
Курсовой проект по дисциплине "Телемеханика".
На тему:"Система телеуправления и телесигнализации электрических подстанций".
Минск 2017
В качестве объекта телемеханизации служат электрические подстанции 110/10кВ. В качестве объектов управления являются вакуумные выключатели 10кВ отходящих фидеров.
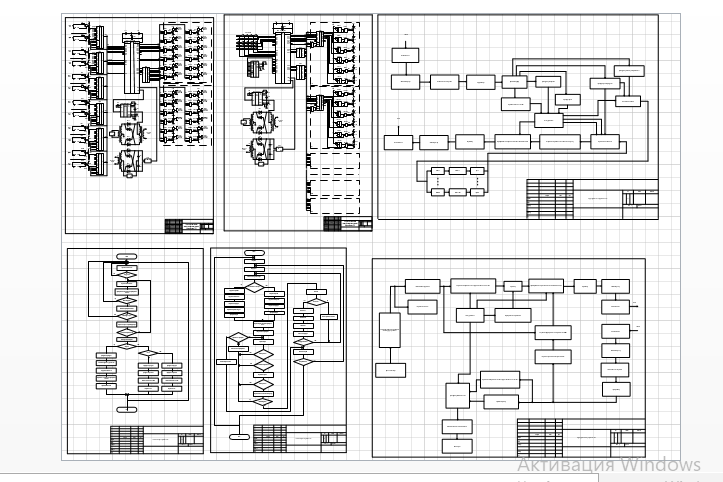
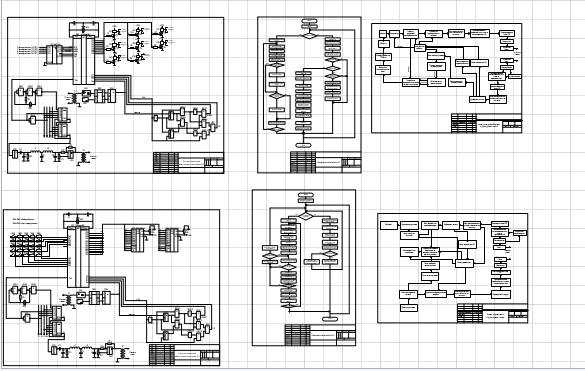
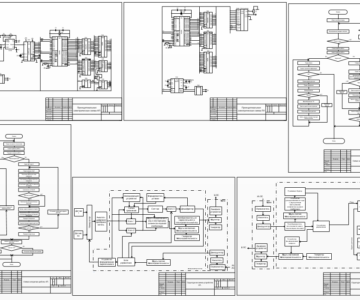
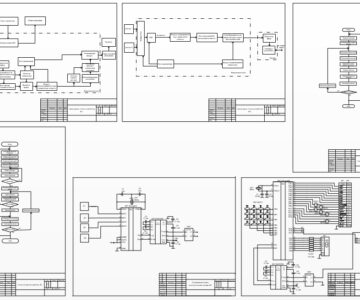
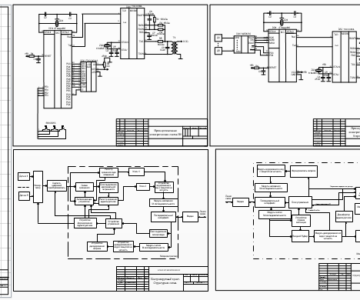
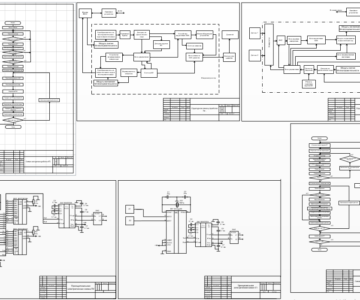
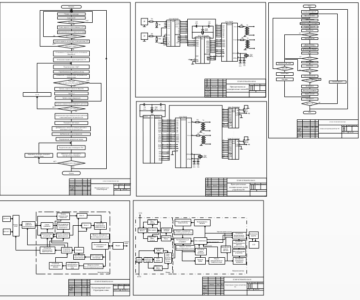
Графическая часть содержит: структурная схема контролируемого пункта и пункта управления, алгоритм функционирования контролируемого пункта и пункта управления, принципиальную электрическую схему системы и контролируемого пункта.
При выборе контроллера учитывается следующие факторы. Возможность работы с внешним ОЗУ, что позволяет упростить работу с модемом, и микросхемами АЦП. Большое число параллельных портов ввода вывода, что позволит на каждый порт назначить отдельную функцию по управлению периферийными микросхемами и несколько упростить программирование. Большой объем команд. Желательно что бы семейство контроллеров было ранее изучено. Имелась хорошая поддержка в виде документации, и удобного и доступного программного обеспечения для работы с микроконтроллером. Всем заданным параметрам соответствует 8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением ATmega64.
Содержание
Введение..................................................................................................................5
1 Выбор структуры системы, линий связи и структуры сигналов....................6
1.1 Выбор структуры системы ................................................................... 6
1.2 Выбор линии вязи................................................................................... 7
1.3 Выбор структуры сигналов ................................................................... 7
2 Алгоритм функционирования системы ...........................................................10
2.1 Алгоритм функционирования контролируемого пункта .................. 10
2.2 Алгоритм функционирования пункта управления..............................10
3 Разработка структурной схемы системы..........................................................12
3.1 Структурная схема контролируемого пункта......................................12
3.2 Структурная схема пункта управления................................................12
4 Расчет частотных и временных параметров....................................................14
5 Выбор линий связи.............................................................................................16
6 Выбор элементной базы системы ....................................................................17
7 Проектирование принципиальной электрической схемы системы...............21
7.1 Принципиальная электрическая схема контролируемого пункта.....21
7.2 Принципиальная электрическая схема пункта управления ..............22
8 Системные расчеты............................................................................................25
8.1 Расчет помехоустойчивости.................................................................25
8.2 Спектр сигнала линии cвязи… ........................................................... 26
8.3. Пропускная способность канала.........................................................27
8.4 Расчет надежности.................................................................................28
9 Разработка программного обеспечения...........................................................30
9.1 Программное обеспечение ПУ...............................................................30
9.2 Программное обеспечение КП...............................................................32
Заключение............................................................................................................37
Литература.............................................................................................................38
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности