МИНОБРНАУКИ РОССИИ
федеральное государственное бюджетное образовательное учреждение
высшего образования
«Самарский государственный технический университет»
(ФГБОУ ВО «СамГТУ»)
Кафедра «Электропривод и промышленная автоматика»
Курсовая работа
по дисциплине
«Электрический привод»
Вариант проекта № 4.
Самара, 2018г.
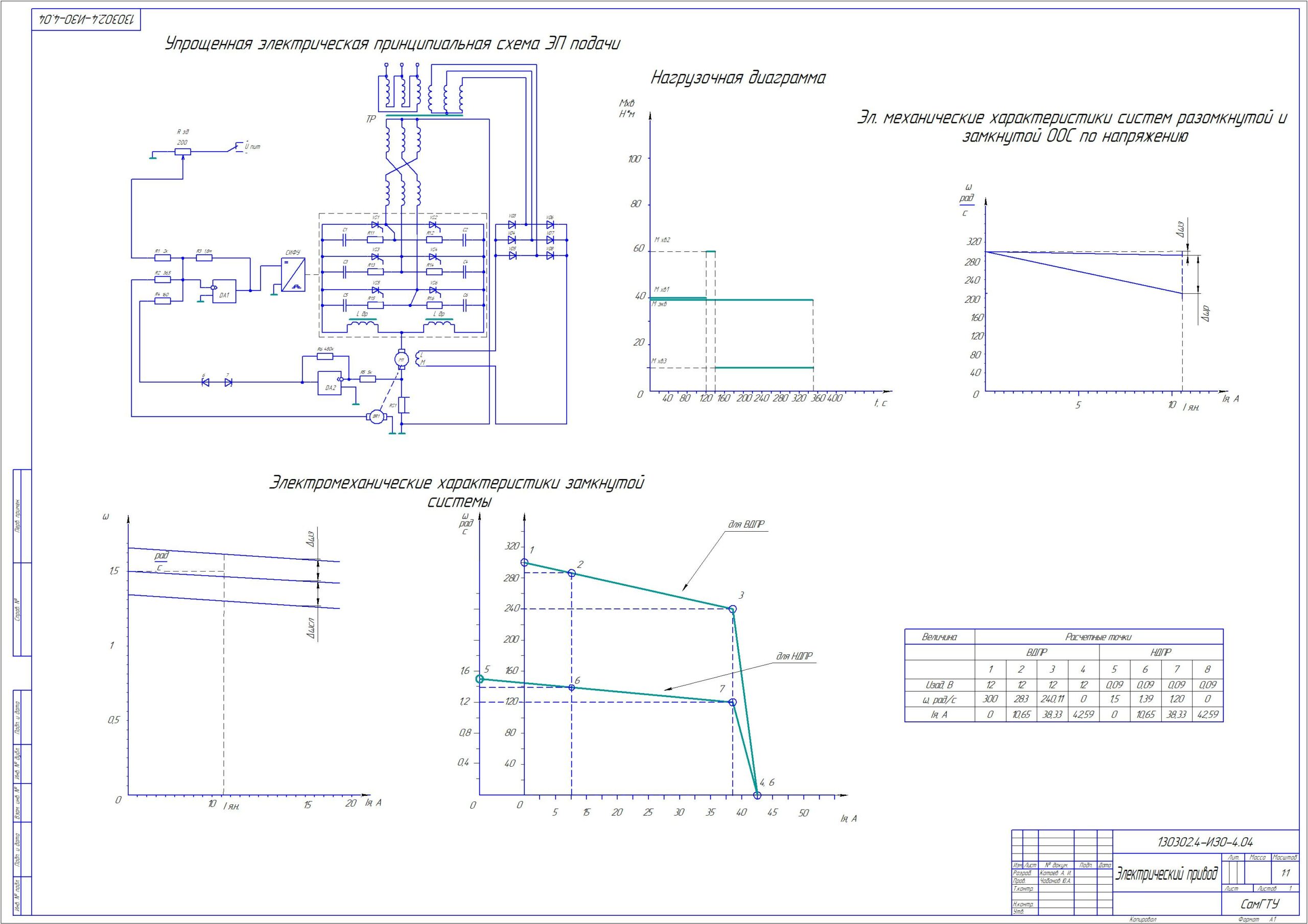
2.1. Электропривод (ЭП)
диапазон регулирования, – 200
статическая ошибка, Δдоп, [%] – 5
требуемая скорость двигателя на ВПДР, ω, [рад/с] – 300
2.2. Нагрузочная диаграмма
момент на ходовом винте:
МХВ0, [Н•м] – 10
МХВ1, [Н•м] – 40
МХВ2, [Н•м] – 60
интервалы времени для соответствующих моментов:
t1, [с] – 120
t2, [c] –140
tцикла [с] – 350
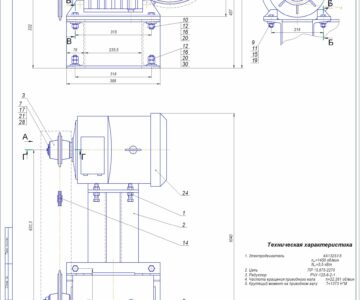
2.3. Кинематическая цепь
передаточное отношение, ip – 25
к.п.д., ηp, [%] – 0,85
радиус приведения, ρ, [м/рад] – 0,012
диаметр ходового винта, dxв, [м] – 0,08
длина ходового винта, lхв, [м] – 1,8
2.4. Суппорт
длина, а, [м] – 0,15
ширина, b, [м] – 0,7
высота, с, [м] – 1.8
Проектируется электромеханическая система стабилизации частоты вращения. Основное содержание работы – синтез и расчеты регулируемых электроприводов в статическом режиме.
В данном курсовом проекте необходимо спроектировать ЭП производственного механизма, требующего регулирование скорости при постоянном наибольшем допустимом моменте в диапазоне D, со статической ошибкой, не превышающей Δдоп.. Требуемая скорость двигателя на ВПДР равна ωверх. Механизм работает в длительном режиме с переменной нагрузкой.
СОДЕРЖАНИЕ
1. Введение……………………………………………………………………...3
2. Исходные данные……………………………………………………………4
3. Расчет требуемой мощности и выбор двигателя…………………………..5
4. Расчет времени разгона……………………………………………………...6
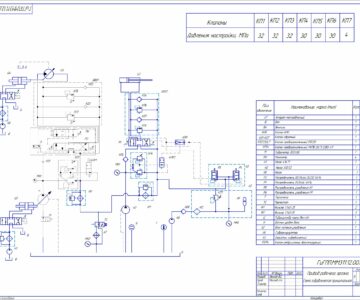
5. Выбор элементов силового преобразователя………………………………7
6. Расчет статики………………………………………………………………10
7. Расчет узла задержанной обратной связи по току………………………..20
8. Описание работы схемы……………………………………………………22
9. Список литературы…………………………………………………………23
10 Приложения………………………………………………………………...24
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности