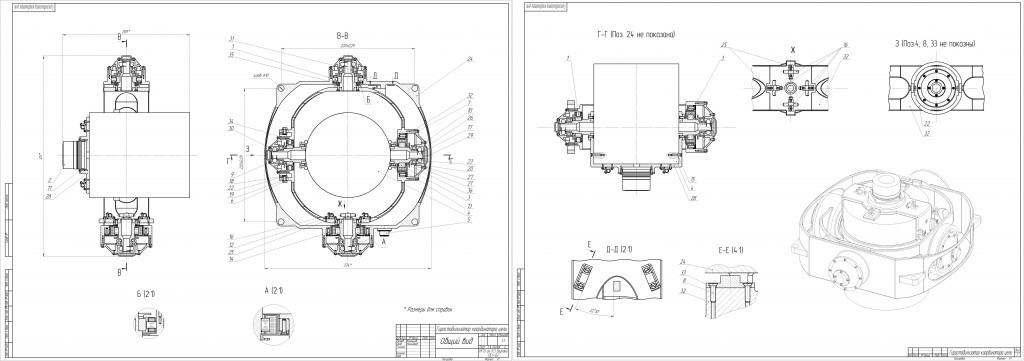
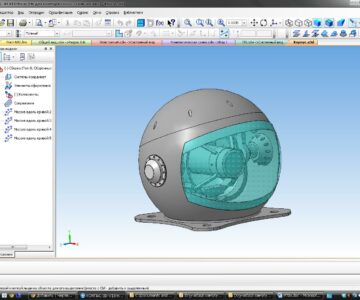
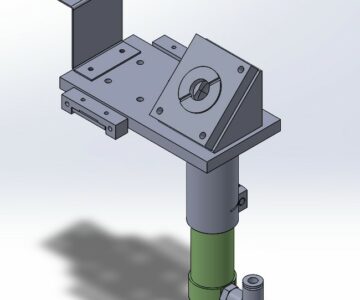
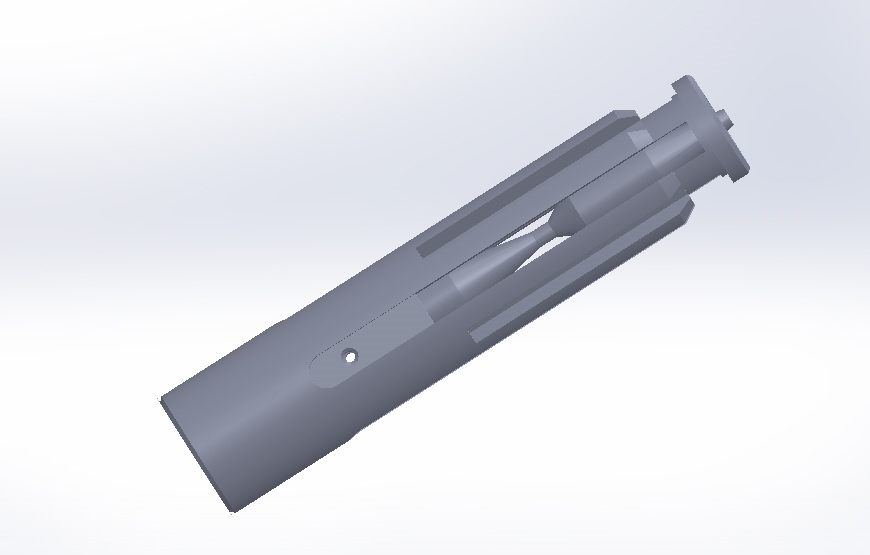
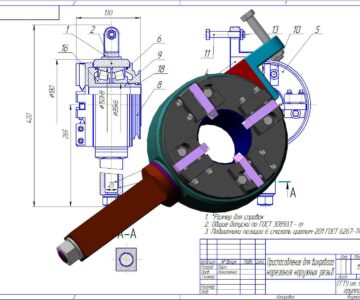
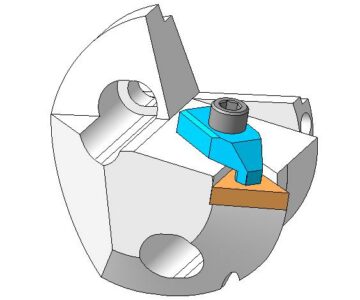
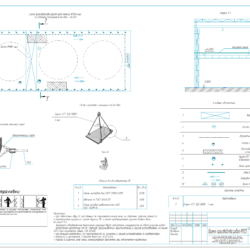
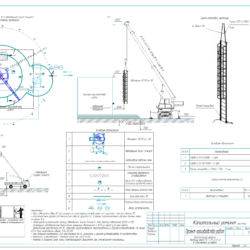
Курсовой проект по теории гироскопов и гиростабилизаторов (МГТУ им. Н.Э. Баумана, каф ИУ-2). Изделие представляет из себя карданов подвес на который соосно установлен пеленгатор (координатор цели, показан в виде масса габаритного макета) и трёхстепенный безкарданный гироскоп (БГТУ). На двух осях чувствительности расположены Датчики углов и датчики моментов. Техническое задание, подробное описание прибора, кинематическая и электрическая схемы прилагаются. Так же прилагается расчёт на прочность (файлы для SolidWorks Simulation (COSMOS) не прилагаются) наиболее нагруженной детали в соответствии с ТЗ.
- Главная -
- Чертежи -
- Машиностроение и механика -
- Приборостроение -
- Двухосный гиростабилизатор координатора цели (головка самонаведения)
Двухосный гиростабилизатор координатора цели (головка самонаведения)
0
312
6977
12
0
200
Сообщить о проблеме
Автор
Дата
16.04.2013
Язык
Русский
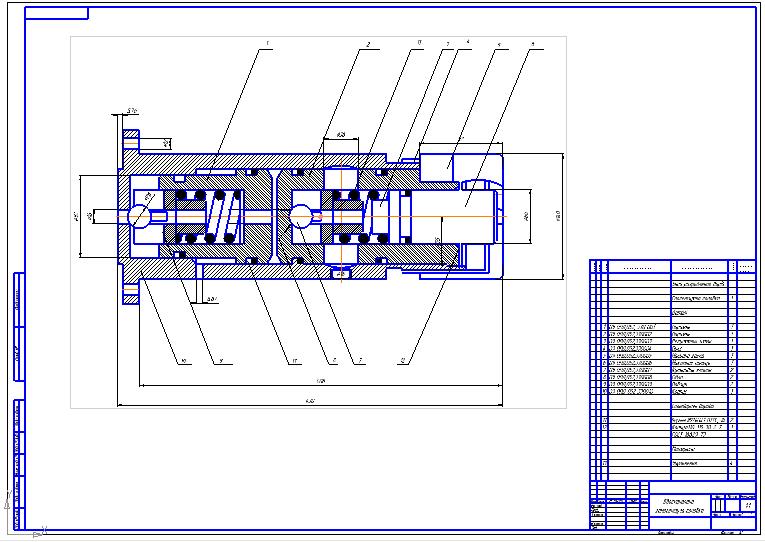
Состав
Общий вид со спецификацией всего изделия, кинематическая схема, электрическая схема, расчётно пояснительная записка, расчёт возмущающих моментов, расчёт на устойчивость гиростабилизатора
Софт
Компас 3D 12, doc
Отзывов пока нет
Содержимое архива
-
-
 Прочность РПЗ.doc
Прочность РПЗ.doc
-
РПЗ моё.doc
-
-
-
-
 КинематическаяСхема.cdw
КинематическаяСхема.cdw
-
-
-
-
-
Общий вид Лист1.cdw
-
 Спецификация (общий вид).spw
Спецификация (общий вид).spw
-
-
-
-
-
Эл. Схема.cdw
-
-
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:
Отзывов пока нет
Чтобы оставить отзыв, необходимо войти
Войти с помощью:
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности