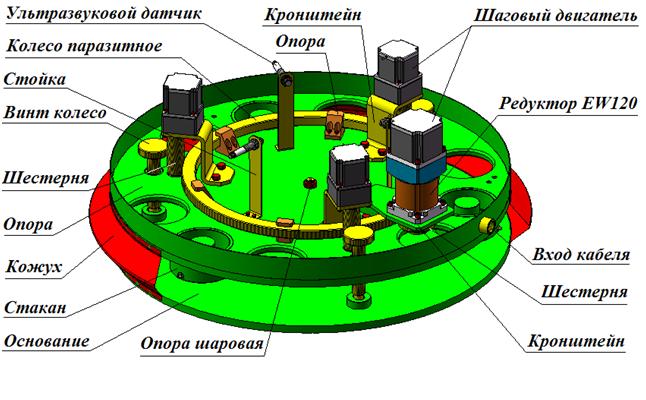
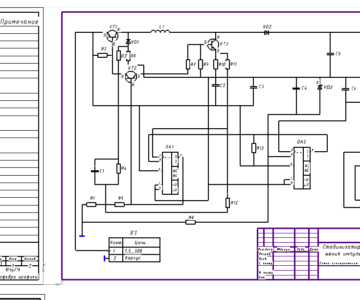
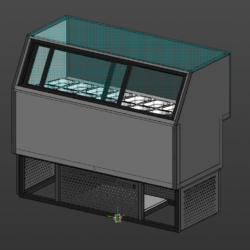
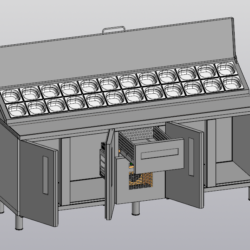
Стабилизатор СМ-46.01.000СБ предназначен для горизонтального выравнивания опоры подъемников относительно опорной строительной площадки, имеющей уклон до 5 градусов. Он представляет собой листовое основание, на котором через шаровую опору закреплена опора подъемников. В центре основания закреплена пята для шаровой опоры. По окружности через 120 градусов приварены ограничители, направляющие для винт колес. Винты колеса ввернуты в гайки опоры до упора в основание внутри ограничителей, а их колеса входят в прямозубое зацепление с шестернями, закрепленными на валах редукторов FL86STHJB. Редукторы закреплены на кронштейнах и имеют в качестве привода шаговые двигатели FL86STH65-5904A. Нижние концы винтов колес установлены в шарикоподшипники, расположенные в расточках опоры. На опоре через 60 градусов закреплены бронзовые опоры, которые поддерживают паразитное прямозубое колесо, предназначенное для вращения обойм подъемников, закрепленных в стаканах опоры. Привод вращения паразитного колеса осуществляется от шестерни, закрепленной на валу редуктора EW120, соединенного с шаговым двигателем FL110STH99-5504A. Редуктор закреплен на сварном кронштейне, закрепленном на опоре. Под сварным кронштейном с тыльной стороны паразитного колеса на оси опоры установлен шарикоподшипник, воспринимающий усилие от зубчатого зацепления. Через 120 градусов опоры закреплены стойки с ультразвуковыми датчиками расстояния BUS M18, направленными на центр шаровой опоры. На обечайке опоры имеется втулка для входа кабеля питания и управления электроприводов. Основание и опора соединены между собой гофрированным тканевым кожухом, который закреплен на них с помощью хомутов.
Имеется комплект рабочих чертежей
- Главная -
- Чертежи -
- Машиностроение и механика -
- Подъемно транспортные установки (ПТУ) -
- Краны -
- Стабилизатор опоры 3D
Стабилизатор опоры 3D
0
2
476
0
0
80
Сообщить о проблеме
Автор
Дата
17.08.2018
Язык
Русский
Состав
Модели деталей и сборок 3D
Софт
SolidWorks 2007
Как открыть?
Отзывов пока нет
Содержимое архива
-
 Болт М6-8gх20.36.019 ГОСТ 7798-70.SLDPRT
Болт М6-8gх20.36.019 ГОСТ 7798-70.SLDPRT
-
Болт М12-8gх25.36.019 ГОСТ 7798-70.SLDPRT
-
Болт М16-8gх60.36.019 ГОСТ 7798-70.SLDPRT
-
Винт М8 x 25 ГОСТ 11738-84.SLDPRT
-
Винт М8-6gх20.36.019 ГОСТ 1476-93.SLDPRT
-
Винт М8х25 ГОСТ 1491-80.SLDPRT
-
Гайка М8-7Н ГОСТ 5915-70.SLDPRT
-
Гайка М16-7Н.36.019 ГОСТ 5915-70.SLDPRT
-
Гайка М20-7Н.36.019 ГОСТ 5915-70.SLDPRT
-
Кольцо А20 ГОСТ 13940-86.SLDPRT
-
Масленка 1.2.Ц6 ГОСТ 19853-74.SLDPRT
-
Подшипник 104 ГОСТ8338-75.SLDPRT
-
Редуктор EW120 i=25 ООО НПФ Электропривод.SLDPRT
-
 СМ-46.01.000СБ Стабилизатор.SLDASM
СМ-46.01.000СБ Стабилизатор.SLDASM
-
СМ-46.01.001 Опора шаровая.SLDPRT
-
СМ-46.01.002 Прижим.SLDPRT
-
СМ-46.01.003 Винт.SLDPRT
-
СМ-46.01.004 Кожух.SLDPRT
-
СМ-46.01.005 Колесо.SLDPRT
-
СМ-46.01.006 Стойка.SLDPRT
-
СМ-46.01.007 Шестерня паразитная 4х207.SLDPRT
-
СМ-46.01.008 Опора.SLDPRT
-
СМ-46.01.009 Стойка.SLDPRT
-
СМ-46.01.100СБ Основание.SLDASM
-
СМ-46.01.101 Основание.SLDPRT
-
СМ-46.01.102 Пята.SLDPRT
-
СМ-46.01.103 Ограничитель.SLDPRT
-
СМ-46.01.200СБ Опора.SLDASM
-
СМ-46.01.201 Опора.SLDPRT
-
СМ-46.01.202 Накладка.SLDPRT
-
СМ-46.01.203 Стакан.SLDPRT
-
СМ-46.01.204 Ось.SLDPRT
-
СМ-46.01.205 Обечайка.SLDPRT
-
СМ-46.01.206 Втулка.SLDPRT
-
СМ-46.01.207 Упор.SLDPRT
-
СМ-46.01.300СБ Кронштейн.SLDASM
-
СМ-46.01.301 Основание.SLDPRT
-
СМ-46.01.302 Стойка.SLDPRT
-
СМ-46.01.303 Основание.SLDPRT
-
СМ-46.02.009 Шестерня 4х19.SLDPRT
-
Ультразвуковой датчик расстояния BUS M18K0-XAFX-060-S04K.SLDPRT
-
Шаговый двигатель NEMA FL86STH65-5904A с редуктором FL86STHJB ООО Линейные системы.SLDPRT
-
Шаговый двигатель NEMA FL86STH80 -5504A с редуктором FL86STHJB ООО Линейные системы.SLDPRT
-
Шаговый двигатель NEMA FL110STH99 -5504A ООО Линейные системы.SLDPRT
-
Шаговый двигатель Nema FL110STH99 -5504A с редуктором EW120 ООО 25.SLDASM
-
Шайба 6 65Г 019 ГОСТ 6402-70.SLDPRT
-
Шайба 8 65Г 019 ГОСТ 6402-70.SLDPRT
-
Шайба 12 65Г 019 ГОСТ 6402-70.SLDPRT
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:


Отзывов пока нет
Чтобы оставить отзыв, необходимо войти
Войти с помощью:
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности