НИУ МЭИ, институт ЭнМИ, кафедра РМДиПМ, направление 15.03.06 Мехатроника и робототехника, ВКР тема "Проектирование и разработка мобильного робота для уборки снега на сложных поверхностях", год 2025.
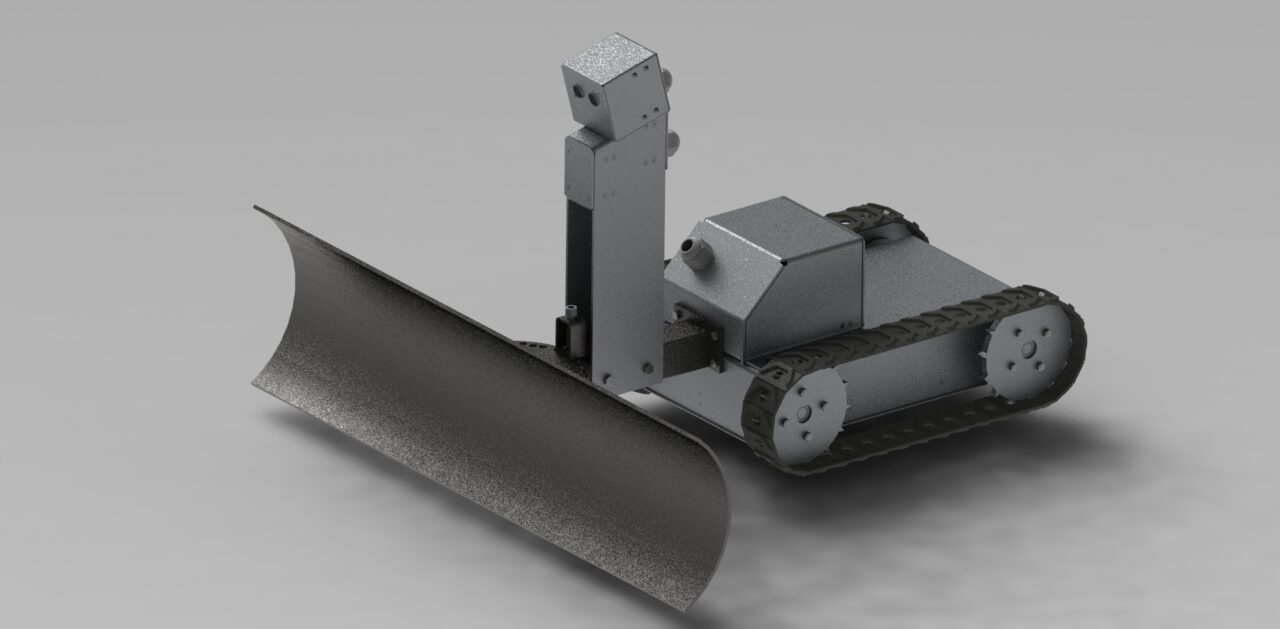
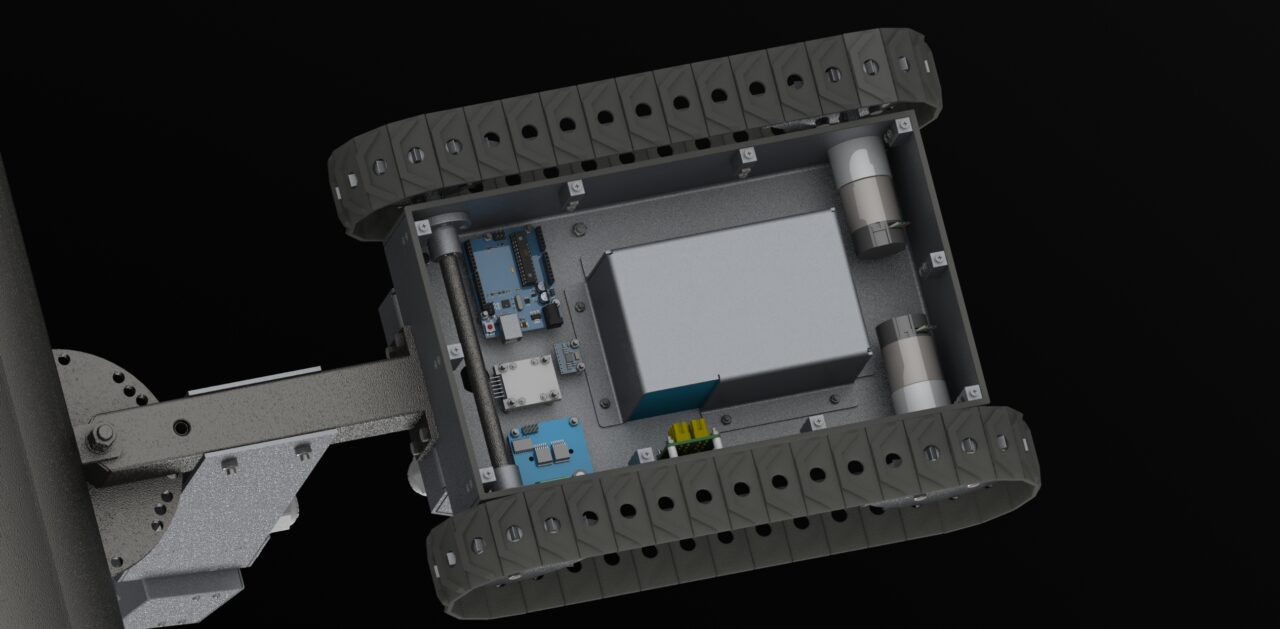
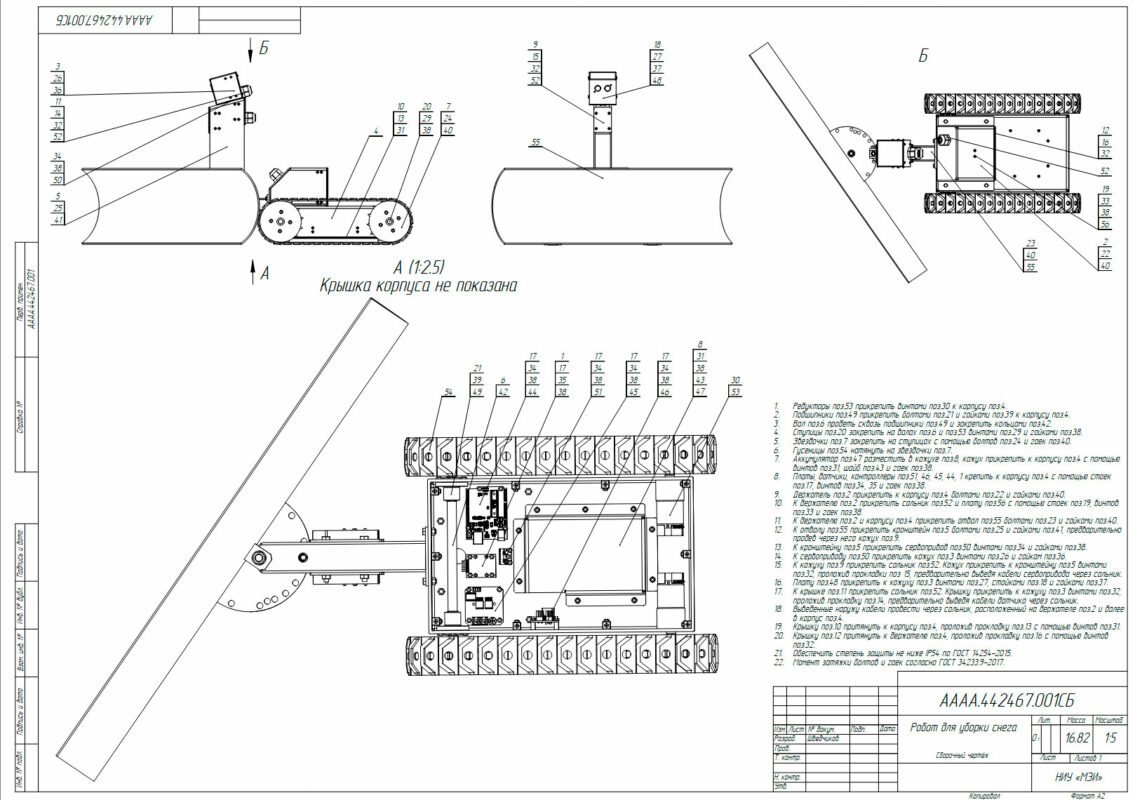
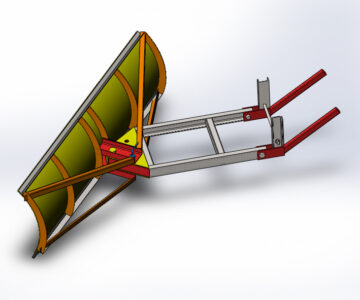
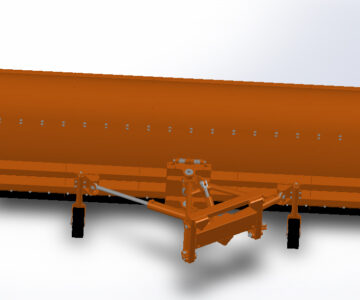
В работе рассматривается задача проектирования и разработки мобильного робота для автономной уборки снега на сложных поверхностях. На основе анализа существующих технических решений сформулированы требования к конструкции и условиям эксплуатации в зимней среде. Разработана 3D-модель платформы в среде SolidWorks, включающая гусеничное шасси, корпус, рабочий орган и размещение компонентов системы управления. Реализована архитектура управления на базе микроконтроллера Arduino с набором сенсоров и алгоритмом конечного автомата для обхода препятствий. Проведены расчёты проходимости, тяговых характеристик, энергопотребления и автономности. Предложенное решение ориентировано на индивидуальное применение, отличается простотой, низкой стоимостью и возможностью дальнейшей модификации. Работа демонстрирует техническую реализуемость концепции и её конкурентоспособность в бытовом сегменте.
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ ....................................................................................................................... 6
1. АНАЛИЗ СУЩЕСТВУЮЩИХ РЕШЕНИЙ И ПОСТАНОВКА ЗАДАЧИ ..................... 8
1.1. Классификация и обзор снегоуборочных роботов ...................................................... 8
1.2. Особенности условий эксплуатации ........................................................................... 12
1.3. Требования к мобильным платформам в зимней среде ............................................ 16
1.4. Постановка задачи и требований к системе ............................................................... 19
2. КОНСТРУКЦИЯ И МОДЕЛИРОВАНИЕ РОБОТА ........................................................ 22
2.1. Выбор ходовой части ................................................................................................... 22
2.2. Компоновка модулей .................................................................................................... 24
2.3. 3D-моделирование в SolidWorks ................................................................................. 37
2.4. Анализ геометрии и проходимости ............................................................................ 40
3. СИСТЕМА УПРАВЛЕНИЯ И АЛГОРИТМЫ НАВИГАЦИИ ....................................... 46
3.1. Архитектура системы управления .............................................................................. 46
3.2. Алгоритм движения, логика обхода препятствий ..................................................... 51
3.3. Имитационное моделирование .................................................................................... 57
3.4. Устойчивость, работа в неблагоприятных условиях ................................................ 60
4. РАСЧЁТЫ И ТЕХНИКО–ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ............................... 65
4.1. Тягово-динамические характеристики ...................................................................... 65
4.2. Энергопотребление ...................................................................................................... 68
4.3. Оценка автономности .................................................................................................. 70
4.4. Экономическая оценка и сравнение ........................................................................... 71
ЗАКЛЮЧЕНИЕ .......................................................................................................................... 73
СПИСОК ЛИТЕРАТУРЫ ......................................................................................................... 75




Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности