Брестский государственный технический университет
Кафедра технологии машиностроения
Курсовая работа по дисциплине "Металлорежущие станки"
Тема: "Разработка кинематики станка"
Брест 2015
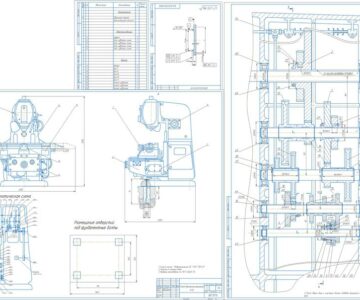
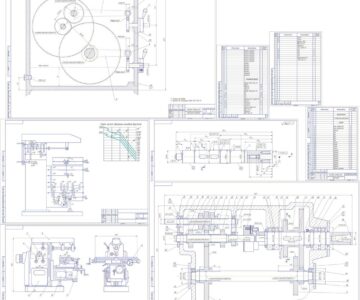
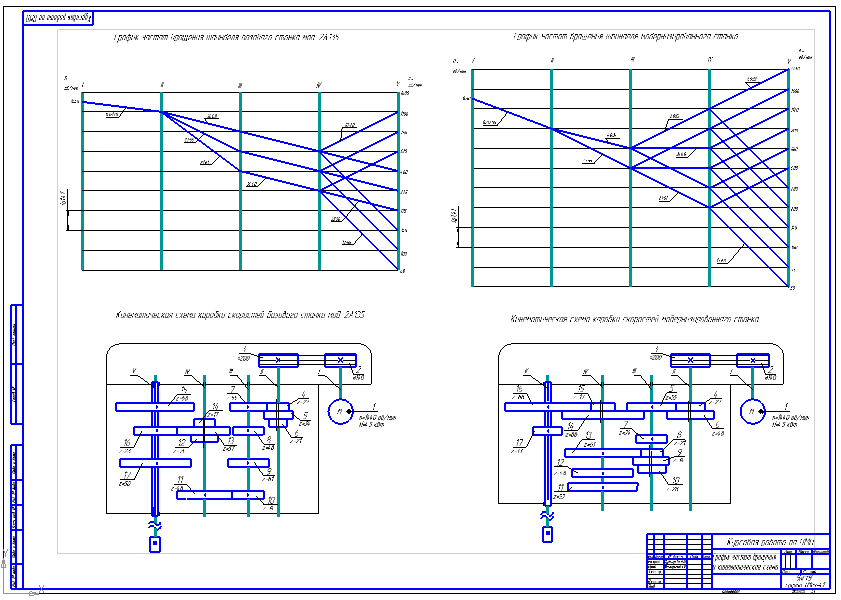
Заданием на проектирование представляется разработка кинематики привода подач и привода главного движения консольно-фрезерного станка на основе станка-прототипа 6Р12 . В ходе курсовой работы определяется назначение станка, будут рассчитаны технические характеристики, спроектирован привод главного движения и подач, произведен их кинематический расчет.
Содержание пояснительной записки:
Введение
1 Определение технических характеристик станка
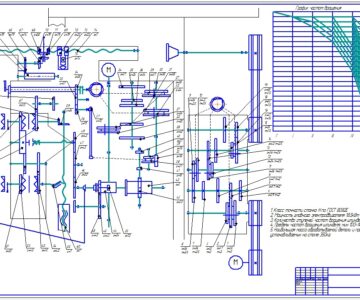
2 Кинематический расчёт привода главного движения
2.1 Определение размерного ряда частот вращения n.
2.2 Выбор оптимальной структурной формулы и построение структур-ной сетки ПГД
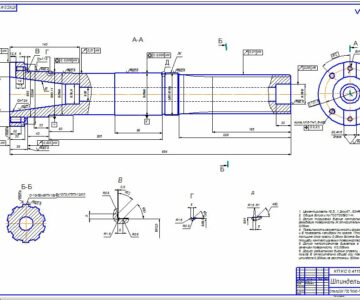
2.3 Построение графика частот вращения привода главного движения и разработка кинематической схемы
2.4 Определение крутящих моментов привода главного движения
3 Кинематический расчёт привода подач
3.1 Определение размерного ряда s
3.2 Выбор структурной формулы привода подач
3.3 Построение структурной сетки подач
3.4 Построение графика подач
Заключение
Список используемых источников
Курсовой проект содержит: лист формата А1 графической части (кинематика станка); пояснительную записку - 21 стр.
Техническая характеристика станка-прототипа:
Габарит станка:
длина…………………………………………………………………………....................... 2305 мм;
ширина ……………………………………………………………………...........................…..1950 мм;
высота ……………………………………………………………………............................….. 2020 мм;
Вес станка ………………………………………………………………..........................……. 3120 кг;
Мощность электродвигателя главного привода …………………........…………7,5 кВт;
Основные размеры:
расстояние от оси шпинделя до вертикальных направляющих станины 350 мм;
размер рабочей поверхности стола (длина/ширина)…………………............ 1250/320 мм;
Наибольшие перемещения стола:
продольное вручную ………………………………………………………....................….800 мм;
продольное механически ……………………………………………………...................800 мм;
поперечное вручную ………………………………………………………....................….250 мм;
поперечное механически ……………………………………………….................……..240 мм;
вертикальное вручную …………………………………………………..................……..420 мм;
вертикальное механически………………………………………………...............…... 410 мм;
Перемещение на одно деление лимба …………………………..........…………0,05 мм;
Перемещение на один оборот лимба:
продольное и поперечное ……………………………………………………............….6 мм;
вертикальное …………………………………………………………………...................….2 мм;
Автоматическая прерывная продольная подача …………………………… есть;
Число Т-образных пазов…………………………………………………………..........…. 3;
Максимальное осевое перемещение пиноли шпинделя от руки …...70 мм;
Перемещение пиноли на один оборот лимба ……………………………...… 4 мм;
Перемещение пиноли на одно деление лимба…………………………........ 0,05 мм;
Максимальный угол поворота шпиндельной головки ……………....….. ±45 град;
Поворот на одно деление шкалы ………………………………………….............1 град.
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности