Владимирский государственный университет имени А. Г. и Н. Г. Столетовых (ВлГУ)
Кафедра Технология машиностроения
Курсовая работа по дисциплине «Теория механизмов и машин»
На тему: «Анализ плоских механизмов с низшими кинематическими парами» (Задание 3, вариант Б)
Владимир 2016
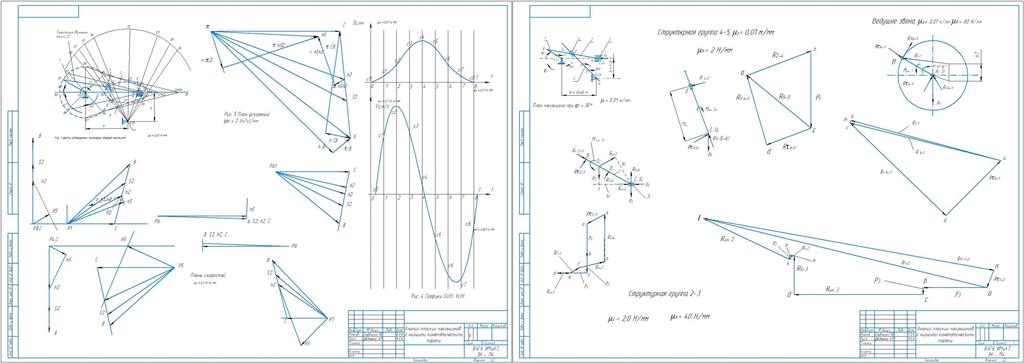
Исходные данные для исследования механизма: угол поворота входного звена ф1 = 30 градусов; длина звена АВ L(AB) = 0,20 м; длина звена ВC L(BC) = 0,60 м; расстояние от оси АS1 до оси ES5 - а = 0,40 м; длина звена ВS2 L(ВS2) = b = L(AB) = 0,20 м; длина звена ВD L(BD) = 0,5*L(BC)=0,30 м; угловая скорость - 32 рад * 1/с; угловое ускорение - 105 рад * с^(-2); масса звена 1 m1 = 13 кг; масса звена 2 m2 = 26 кг; масса звена 3 m3 = 40 кг; масса звена 5 m5 = 35 кг; сила полезного сопротивления F3 = 4000 H;
Обозначение на схеме: 1 - кривошип; 2 - шатун; 3 - ползун; 4 - камень кулисы; 5 - коромысло (4 и 5 - кулиса); 6 - направляющая
В данной работе рассматриваются плоские механизмы с низшими кинематическими парами, предназначенные для преобразования возвратно-поступательного движения (например - поршня) во вращательное движение (например, во вращательное движение коленчатого вала в двигателях внутреннего сгорания), и наоборот.
Объектом исследования является - кривошипно-ползунный механизм (КПМ). Движение механизма происходит под действием движущего момента, приложенного к главному валу (звено 1 - кривошип). При движении ползуна (звено 3) горизонтально вправо на него действует сила полезного сопротивления F3. Это полезный рабочий ход. При движении ползуна влево сила F3 отсутствует. Это обратный (холостой) ход. Величину силы F3 и движущего момента M1 считаем постоянными. Кроме этого на звенья механизма действуют силы тяжести и инерции, а также силы трения в кинематических парах, которыми можно пренебречь.
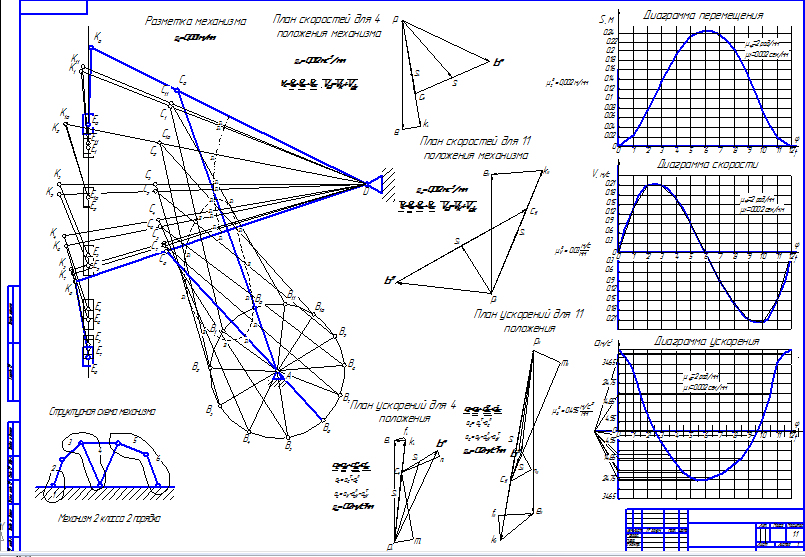
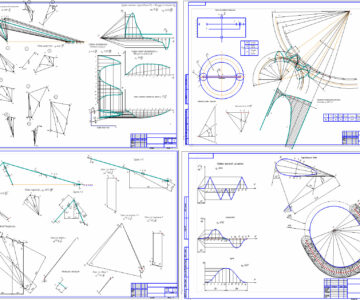
Графическая часть содержит два листа А2 и пояснительную записку объёмом 18 страниц. На листе № 1 приведены шесть совмещённых положений механизма и план скоростей, а также план ускорений. На листе № 2 приведен план механизма.
Содержание работы:
Введение
1. Кинематический анализ механизма
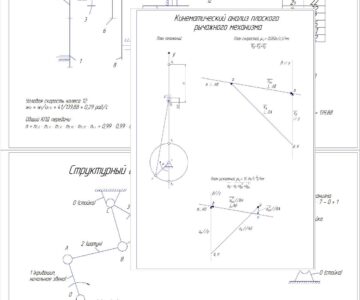
1.1. Структурное исследование механизма
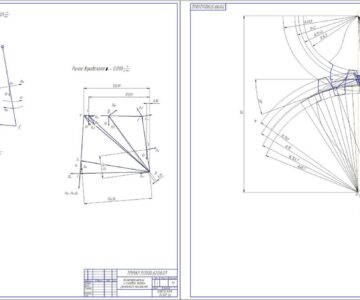
1.2. Построение кинематической схемы механизма
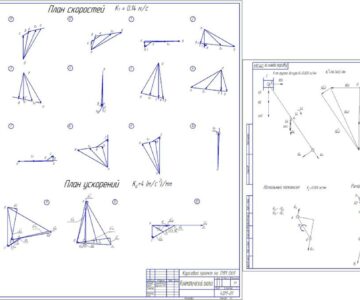
1.3. Построение плана скоростей механизма
1.4. Построение плана ускорений механизма
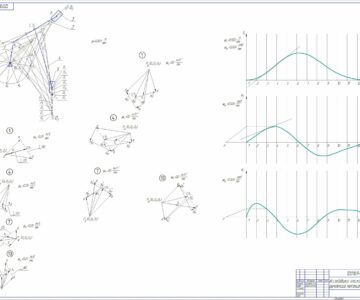
1.5. Кинематические диаграммы точки С (ползуна 3)
1.5.1. Построение графика перемещения точки С
1.5.2. Построение графика скорости точки С
2. Силовой анализ механизма
2.1. Определение сил инерции, моментов инерции, действующих на механизм, весов звеньев механизма
2.2. Силовой расчёт структурных групп для заданного положения механизма
2.2.1. Структурная группа из звеньев 4-5
2.2.2. Структурная группа из звеньев 2-3
2.2.3. Силовой расчёт ведущего звена механизма (кривошип АВ)
Заключение
Библиографический список





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности