Казанский национальный исследовательский технический университет
им. А.Н. Туполева-КАИ Альметьевский филиал
Кафедра конструирования и машиностроительных технологий
Курсовая работа по дисциплине «Теория механизмов и машин»
На тему: «Кинематический и силовой анализ рычажного механизм»
Альметьевск 2015
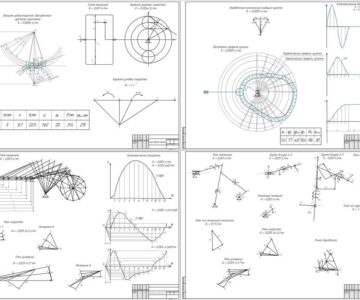
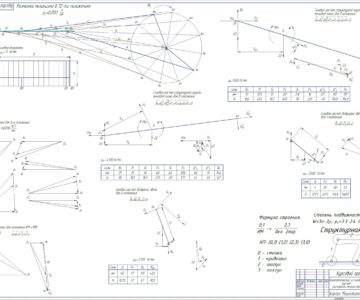
Исходные данные:Механизм имеет пять подвижных звеньев. Названия звеньев: 1 – кривошип; 2 – шатун; 3 – коромысло; 4 – шатун; 5 – ползун. Стойка принята за нулевое звено. Звенья соединены между собой семью одноподвижными кинематическими парами.
Содержание
Введение …………………………………………………………………… 3
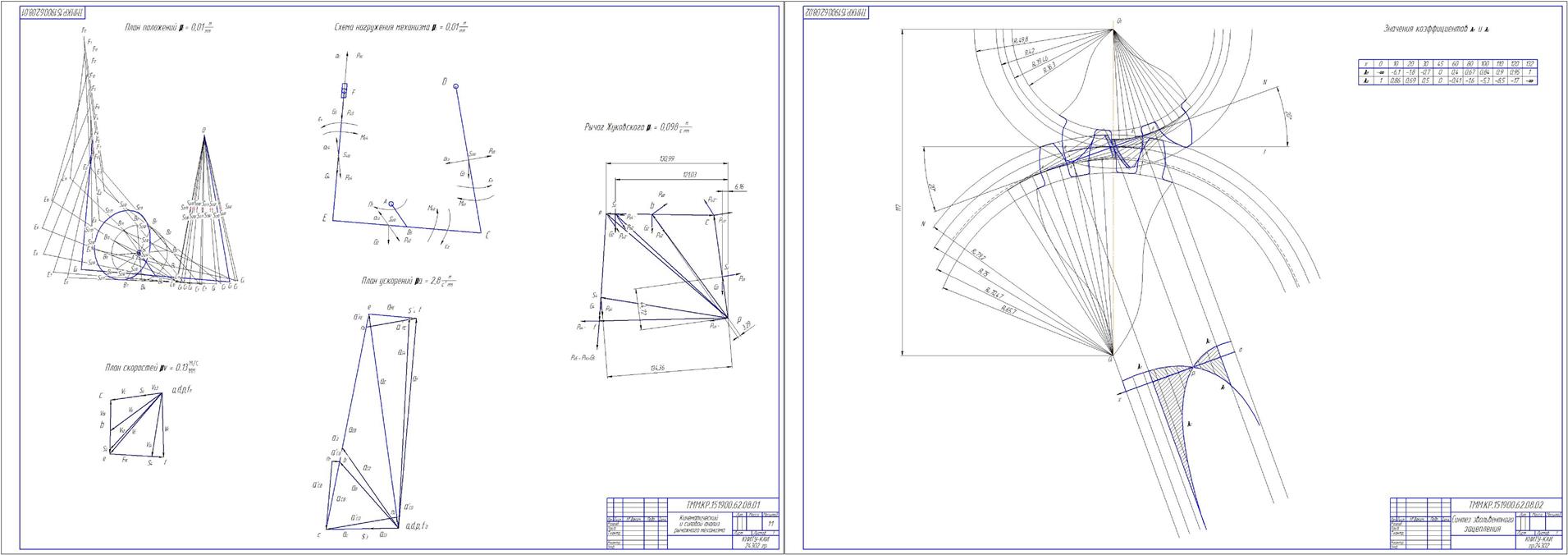
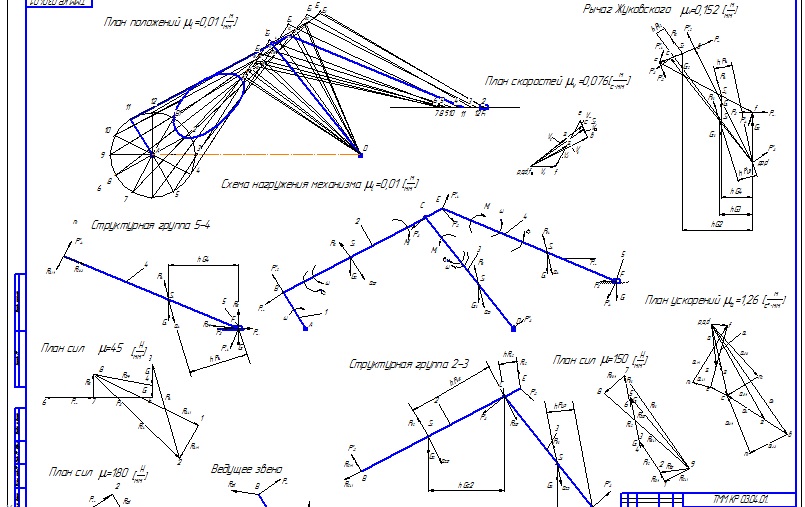
РАЗДЕЛ I. «Кинематический и силовой анализ рычажного механизма»
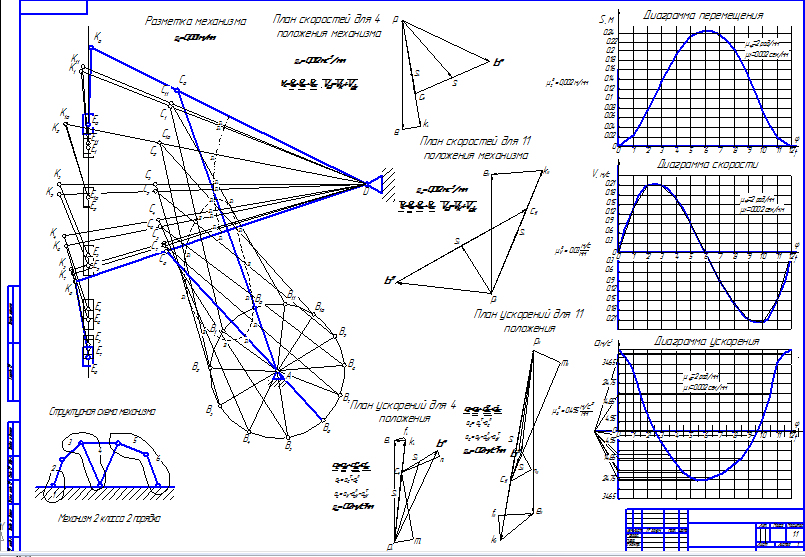
1. Кинематический анализ рычажного механизма
1.1 Определение степени подвижности и класса механизма………….… 4
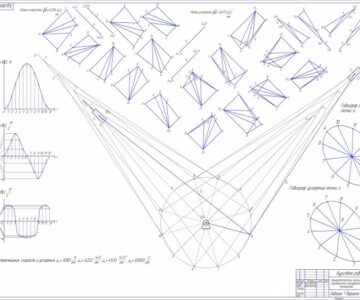
1.2 Построение планов положений механизма …………………….….….6
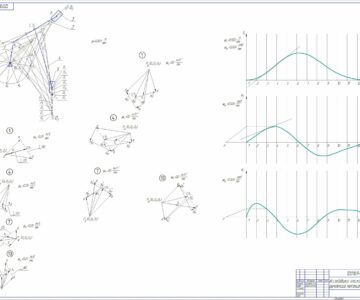
1.3 Построение плана скоростей механизма ………………………..….…8
1.4 Построение плана ускорений механизма …………………………..…11
2. Силовой анализ рычажного механизма …………………………….….…. 17
2.1 Определение уравновешивающего момента методом Жуковского ...19
РАЗДЕЛ II. «Синтез эвольвентного зацепления и кинематика
зубчатых передач»
1. Синтез эвольвентного зацепления
1.1 Определение геометрических параметров зубчатого зацепления ... 22
1.2 Построение картины зацепления ………………….…………..……. 26
Заключение …………………………………………………………………29
Список используемой литературы ………………………………………30





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности