Белорусско-Российский университет
Кафедра “Основы проектирования машин”
Курсовая работа по дисциплине: «Теория механизмов и машин»
На тему: "Механизм привода конвейера"
Могилёв 2017
Исходные данные: кинематическая схема механизма конвейера; ход ползуна 260 мм; углы фиксирующие крайнее положение звена a1= 30 град, а2= 150 град; отношение длин звеньев O3C/O3B = 1,15; Y1>CO3; масса шатуна AB m2=55; масса коромысла O2C m3= 36кг; масса шатуна CD m4=70кг; рабочий угол 260 град; частота вращения электродвигателя nдв = 1400 1/мин; частота вращения кривошипа nкр=80 1/мин; число зубьев шестерни Z5= 12; число зубьев колеса Z6=35; модуль колёс Z5, Z6 m=6.
Содержание
Введение
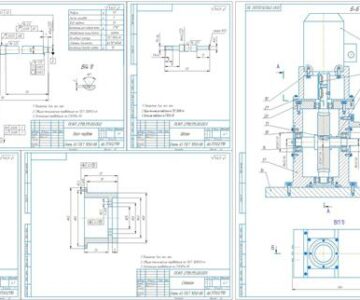
1 СИНТЕЗ РЫЧАЖНОГО МЕХАНИЗМА
1.1 Структурный анализ механизма
1.2 Определение недостающих размеров
1.3 Определение скоростей точек механизма
1.4Определение ускорений точек механизма
1.5 Диаграмма движения выходного звена
1.6 Определение угловых скоростей и ускорений
1.7 Определение ускорений центров масс звеньев механизма
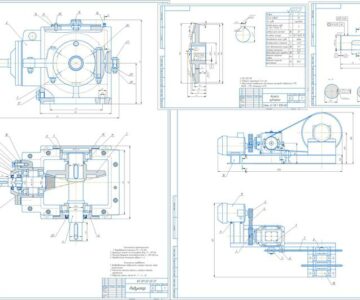
2 СИЛОВОЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
2.1 Определение сил инерции
2.2 Расчёт диады 4-5
2.3 Расчёт диады 2-3
2.4 Расчет кривошипа
2.5 Определение уравновешенной силы методом Жуковского
2.6 Определение мощностей
2.7 Определение кинетической энергии и приведённого момента инерции механизма
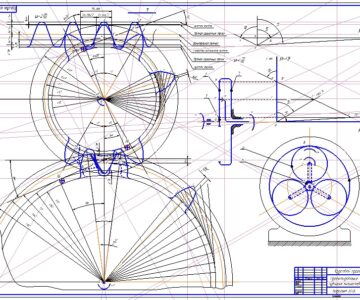
3 ГЕОМЕТРИЧЕСКИЙ РАСЧЁТ ЗУБЧАТОЙ ПЕРЕДАЧИ, ПРОЕКТИРОВАНИЕ ПЛАНЕТАРНОГО МЕХАНИЗМА
3.1 Геометрический расчёт зубчатой передачи
3.2 Синтез планетарного редуктора
3.3 Определение частот вращения зубчатых колёс аналитическим методом
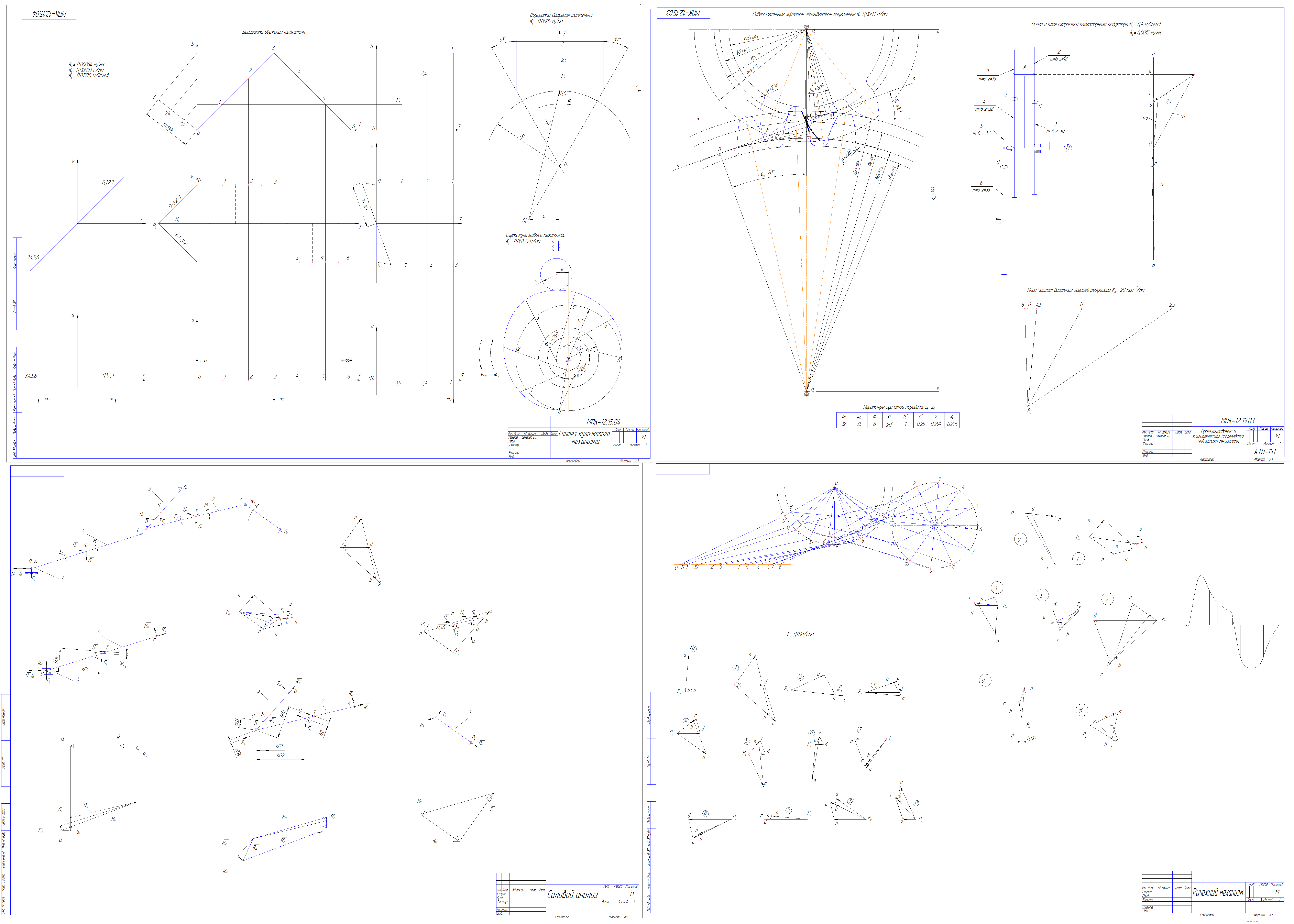
4 СИНТЕЗ И АНАЛИЗ КУЛАЧКОВОГО МЕХАНИЗМА
4.1 Диаграмма движения толкателя
4.2 Выбор минимального радиуса кулачка
4.3 Выбор профиля кулачка
4.3 Определение максимальной линейной скорости и ускорения толкателя
Список использованной литературы





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности