Сибирская автомобильно-дорожная академия,
Кафедра «Техника для строительства и сервиса нефтегазовых комплексов и инфраструктур»
Дипломный проект на тему:«Совершенствование системы управления автогрейдера».
Омск 2015
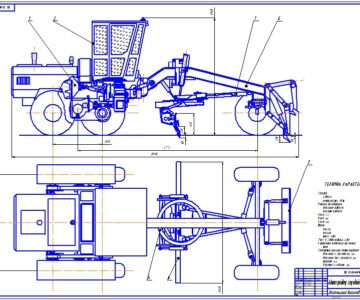
Тема данной выпускной квалификационной работы – "Совершенствование системы управления автогрейдера". В ней рассматривается средний автогрейдер ГС 14.02.
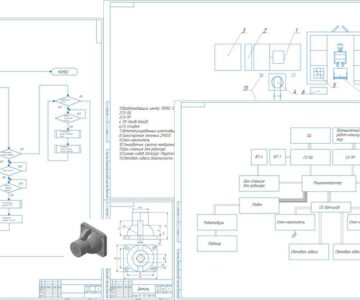
Цель этой работы в совершенствовании системы управления автогрейдером, а именно, оснащение СУ системой ГЛОНАСС+GPS в основе которой лежит нечёткий регулятор, работающий на нечёткой логике.
Необходимость этой модернизации заключается в получении наилучшей, более высокой производительности и точности выполняемой работы автогрейдером.
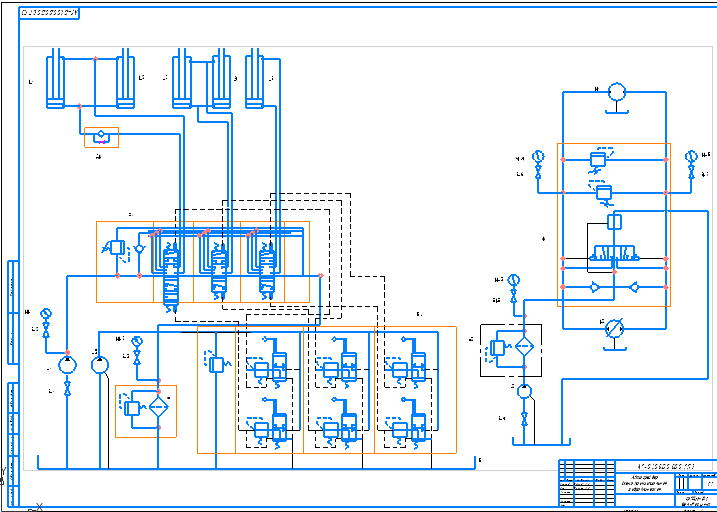
Отталкиваясь от поставленной перед нами цели, в выпускной квалификационной работе рассмотрены требования предъявляемые к работе, устройство дорожной машины, технология выполняемой работы, изложена классификация автогрейдера, а также приведён чертёж с общим видом. В среде MATLAB Simulink выполнена модель автогрейдера. Приведены необходимые функции принадлежности для нечёткого регулятора, и нечёткие правила. Получен график переходного процесса до внедрения ПИД-регулятора, с ПИД-регулятором, без СУ, с нечётким регулятором.
ВВЕДЕНИЕ 5
1 ТЕХНОЛОГИЧЕСКИЙ РАЗДЕЛ 6
1.1 Актуальность проблемы 6
1.2 Назначение и классификация автогрейдеров 7
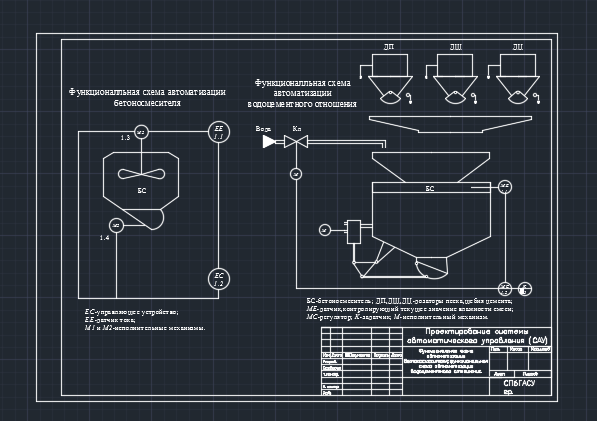
1.3 Описание технологического процесса выполняемого автогрейдером 10
1.4 Система управления автогрейдером 12
1.5 ГЛОНАСС и GPS: История, характеристики, применение 14
1.6 Внедрение нечёткого регулятора 19
1.7 Цель и задачи выпускной квалификационной работы 25
2 РАЗДЕЛ АВТОМАТИЗАЦИИ 26
2.1 Математическая модель автогрейдера 26
2.1.1 Математическая модель микрорельефа 26
2.1.2 Математическое описание ходового оборудования 27
2.1.3 Математическое описание ходовой рамы автогрейдера 28
2.1.4 Математическое описание рабочего органа 32
2.1.5 Математическое описание реакции грунта 37
2.2 Математическое описание автогрейдера в MATLAB Simulink 44
2.3 Выбор технических средств автоматизации 53
2.4 Организационно-экономический раздел 59
ЗАКЛЮЧЕНИЕ 68
СПИСОК ИСПОЛЬЗОВАНЫХ ИСТОЧНИКОВ 69
Проведён анализ математической модели автогрейдера, и на его основе построены графики микрорельефов, с целью выявления наиболее устойчивого варианта, обладающего наименьшей чувствительностью к микрорельефу. В ходе эксперимента, ПИД регулятор показал удовлетворительные результаты, при коэффициентах управления P=63,109; I=150,511; D=70,5859. Система с нечётким регулятором показала наилучшие результаты.
Поэтому система с нечётким регулятором является предпочтительнее.
А также заметим, что скорость и точность позиционирования повысились в 11 раз, а производительность повысилась в 2,5 раза.



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности