Брестский Государственный Технический Университет
Кафедра автоматизации технологических процессов и производств
Курсовой проект по дисциплине "Автоматизированный электропривод"
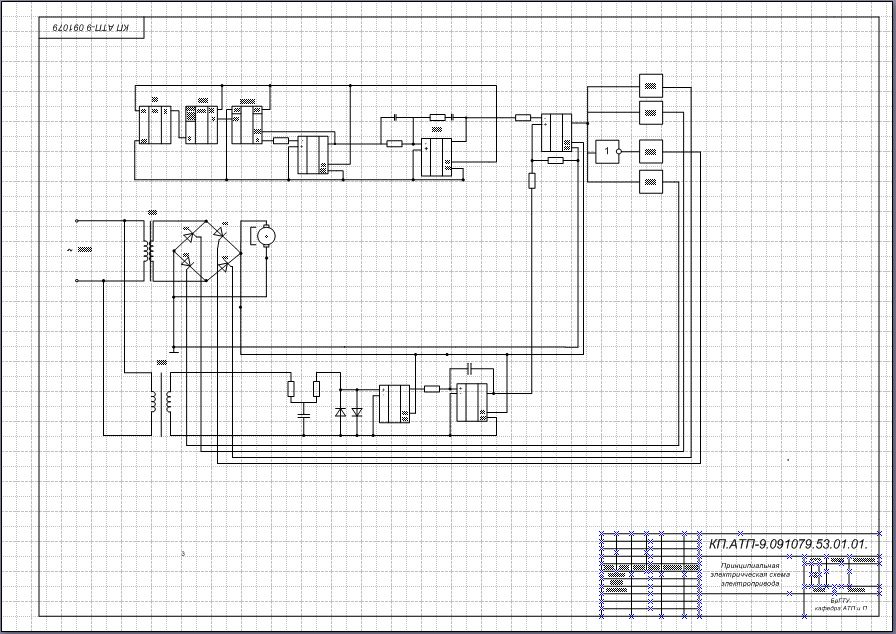
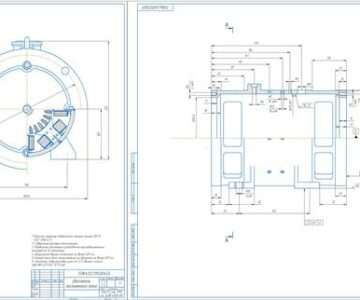
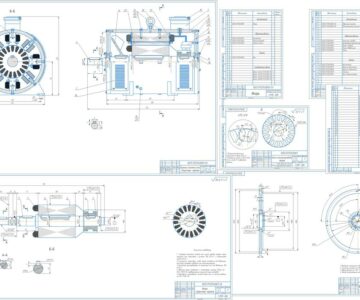
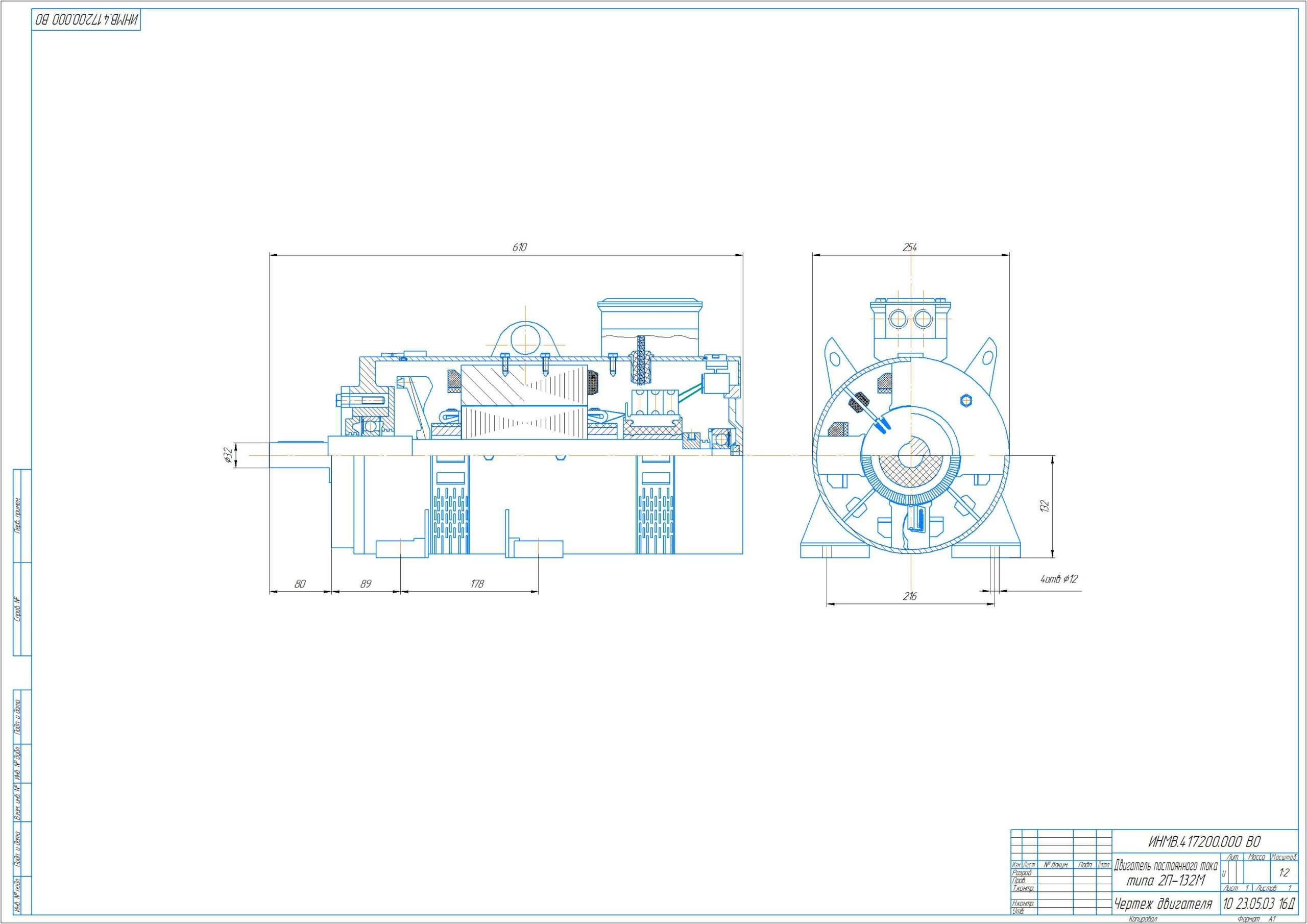
На тему: "Разработка привода вертикального перемещения манипулятора на основе двигателя постоянного тока"
Брест 2012
В данном проекте рассматривается проектирование привода вертикального перемещения манипулятора на основе двигателя постоянного тока. Выполнен кинематический расчет привода, выбор электропривода, а так же выбор и расчёт регулятора.
ТХ манипулятора:
Манипулятор с полярной системой координат (звено 1).
Звено 1: длина – 0,6 м; масса – 5 кг; угол поворота – 0°…180° скорость – 0,5 м/с; ускорение – 4 м/с2;
Звено 2: длина – 0,1…0,6 м; масса – 3 кг; скорость – 0,15 м/с; ускорение – 1 м/с;
Привод поворота: угол поворота - ±140°; скорость – 1,2 с-1; ускорение - 4с-2;
Грузоподъёмность – 6 кг.
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности