Брестский государственный технический университет
Кафедра автоматизации технологических процессов и производств
курсовой проект по дисциплине"Проектировка систем автоматики"
на тему: "Приводы поворота звена манипулятора на основе двигателя постоянного тока"
Брест 2017
Исходные данные к проекту: Манипулятор с шарнирно сочлененной рукой ( звено2 ). Звено 2: длина 0,6 м; масса 2,8 кг; угол поворота (+-)120; скорость 2 с^(-1); ускорение 5 c^(-2); Грузоподъемность 8 кг. Силовой преобразователь ШИР на транзисторах. Система управления с ОС по перемещению и току.
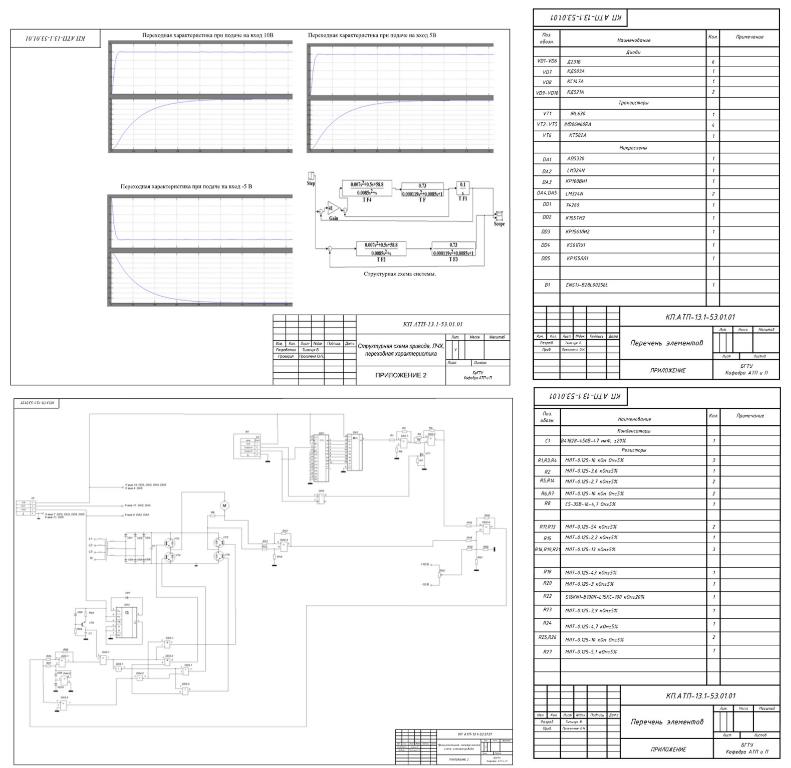
В данной курсовой работе рассчитан привод горизонтального перемещения манипулятора на основе двигателя постоянного тока. Произведен кинематический расчет двигателя. Выбран регулятор, при воздействии которого система удовлетворяет необходимым требованиям. Разработана принципиальная электрическая схема регулятора, силового преобразователя и управляющей части.
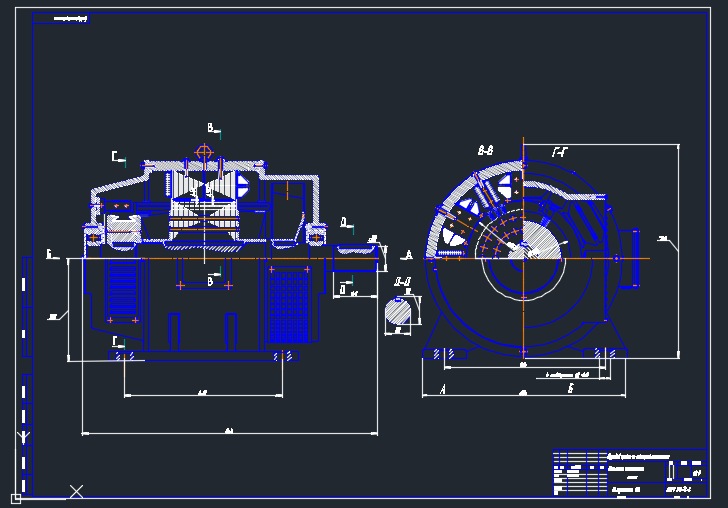
Графическая часть содержит принципиальную электрическую схему подключения исполнительного механизма ( звена манипулятора) к трех фазной сети.
Содержание
Введение
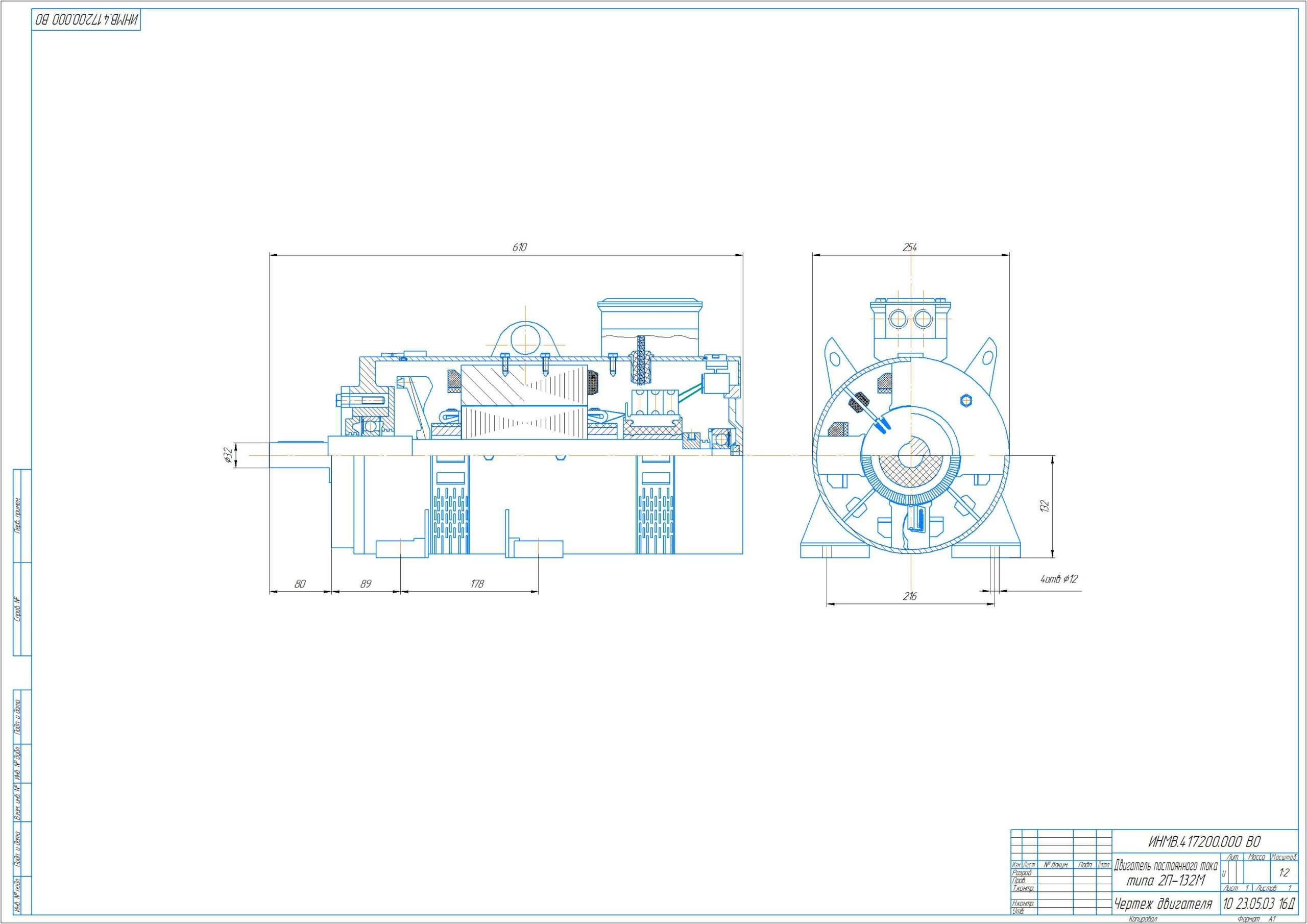
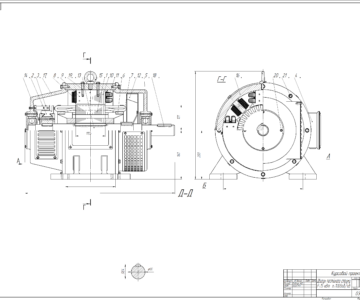
Кинематический расчет привода, выбор привода
Расчет регулятора
Разработка принципиальной электрической схемы регулятора
Расчет параметров и разработка принципиальной электрической схемы силового__ преобразователя
Разработка принципиальной электричесой схемы управляющей части
Заключение
Список литературы
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности