Министерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное
учреждение высшего образования
«Южно-Уральский Государственный Университет
(национальный исследовательский университет)»
Филиал ФГАОУ ВО «ЮУрГУ (НИУ)» в г. Златоусте
Факультет Техники и технологии
Кафедра «Технология машиностроения, станки и инструменты»
КУРСОВОЙ ПРОЕКТ по дисциплине «Автоматизация производственных процессов
в машиностроении»
на тему: "Автоматизация загрузки вертикально-расточного станка с ЧПУ"
, 2024 г.
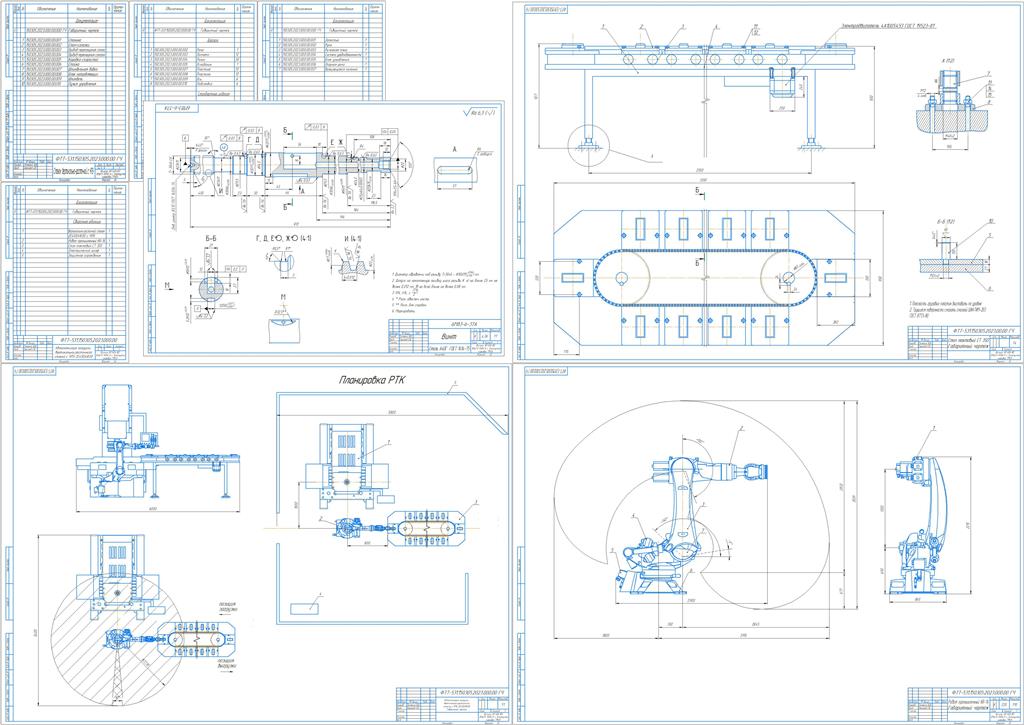
Целью курсового проекта является разработка автоматизации загрузки вертикально-расточного станка. В процессе выполнения проекта был разработан технологический процесс обработки детали «Винт 6М83-6-37А», подобран вертикально-расточной станок.
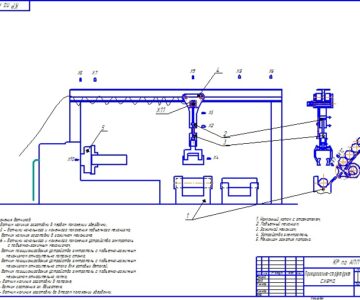
В технологическом разделе был разработан технологический процесс детали «Винт 6М83-6-37А», расчёт типа производства, разработана компоновка автоматизированного комплекса на базе вертикально-расточного станка с ЧПУ.
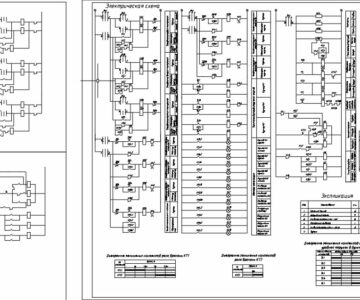
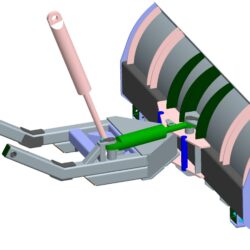
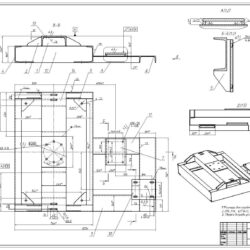
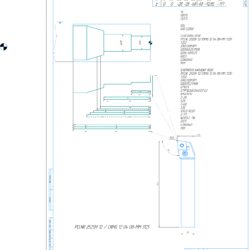
В конструкторском разделе был выбран промышленный робот и транспортно-накопительные устройства, проведен расчет конструктивных параметров узлов. Разработана система автоматического управления.
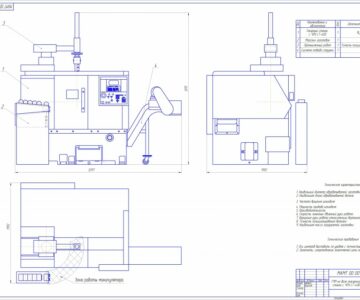
Обработка производится на вертикально-расточном станке модели 2Е450АФ30 с оперативной системой ЧПУ и с применением промышленного робота. В общий объем курсовой работы входит графическая часть, которая состоит из компоновки роботизированного технологического комплекса с промышленным роботом модели КR–16.
Содержание
Введение 5
1 Технологический раздел 7
1.1 Краткие сведения о детали 7
1.2 Проектный технологический процесс 8
1.3 Расчет типа производства 11
1.4 Описание вертикально-расточного станка 2Е450АФ30 12
1.5 Анализ существующих компоновок РТК 14
1.6 Анализ промышленных роботов 17
1.7 Анализ устройств накопления 19
1.8 Задачи проектирования 23
Выводы по разделу один 24
2 Конструкторский раздел 25
2.1 Выбор компоновки автоматизации 25
2.2 Выбор промышленного робота 26
2.2.1 Описание и принцип действия ПР KR-16 28
2.2.2 Структура системы управления ПР KR-16 31
2.2.3 Система управления ПР KR-16 33
2.3 Выбор устройства накопления 35
Выводы по разделу два 38
3 Описание работы устройства 38
Выводы по разделу три 39
4 Алгоритм автоматизации 39
Выводы по разделу четыре 41
5 Расчет элементов устройств 42
5.1. Расчет элементов тактового стола 42
5.1.1 Расчет и выбор привода 42
5.1.2 Выбор приводной цепи 44
5.1.3 Расчет профиля зубьев звездочек приводной роликовой цепи 45
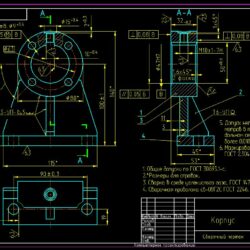
5.1.4 Расчет сечения опор тактового стола 47
5.2 Расчет элементов ПР KR-16 48
5.2.1 Эксплуатационный расчет гидроцилиндра 48
5.2.2 Определение давления и выбор насоса 51
5.2.3 Расчет гидроцилиндра на прочность 52
Выводы по разделу пять 54
Заключение 55
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 56

Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности