Южно-Уральский Государственный Университет
Технология машиностроения, станки и инструменты
Курсовой проект по дисциплине «Автоматизация производственных процессов в машиностроении»
На тему: Автоматизация загрузки токарно-револьверного станка
Челябинск 2020 г
Аннотация
Курсовой проект по предмету «Автоматизация производственных процессов в машиностроении». –, 59 стр., 11 – илл., Библиография литературы – 13 наименований, 2 листа чертежей формата А1, 2 листа чертежей формата А3.
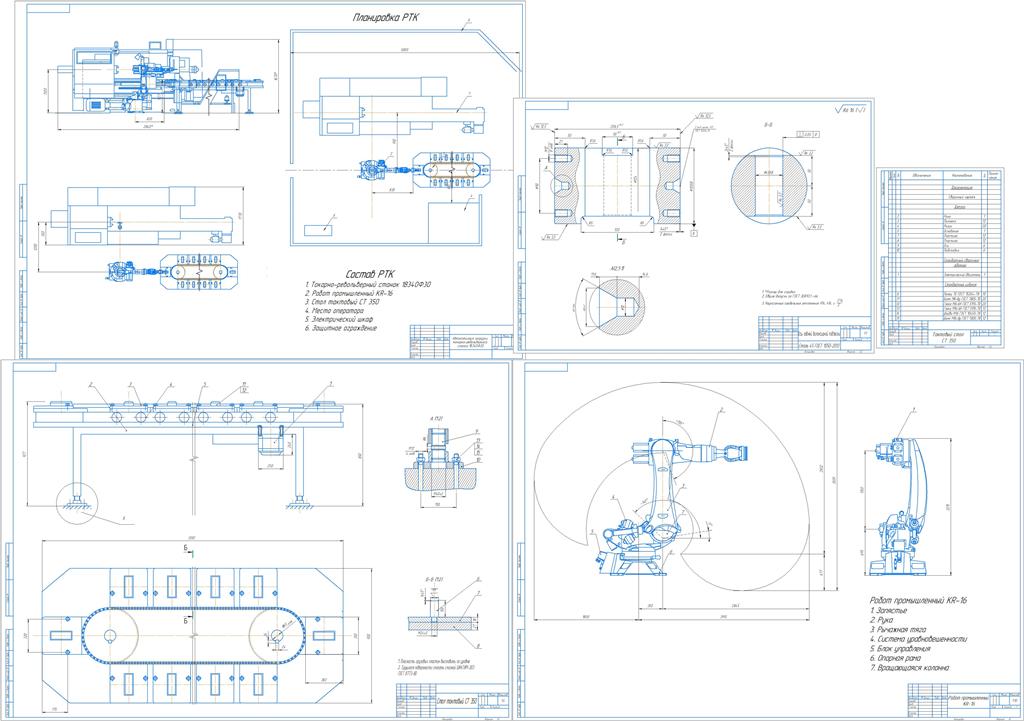
Целью курсового проекта является разработка автоматизации загрузки токарно–револьверного станка. В процессе выполнения проекта был разработан технологический процесс обработки детали «Ось задней балансирной подвески», подобран токарно–револьверный станок.
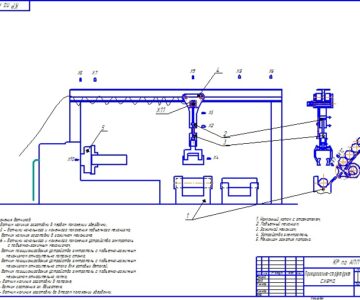
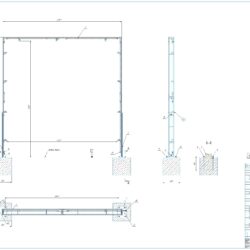
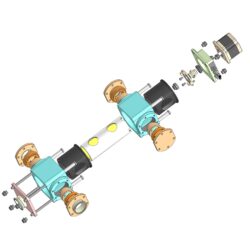
Обработка производится на токарно-револьверном станке модели 1В340Ф30 с оперативной системой ЧПУ и с применением промышленного робота. В общий объем курсовой работы входит графическая часть, которая состоит из компоновки роботизированного технологического комплекса с промышленным роботом модели КR–16.
Содержание
Введение 5
1 Технологический раздел 7
1.1 Краткие сведения о детали 7
1.2 Проектный технологический процесс 8
1.3 Расчет типа производства 9
1.4 Описание токарно-револьверного станка 1В340Ф30 10
1.5 Анализ существующих компоновок РТК 13
1.6 Анализ промышленных роботов 16
1.7 Анализ устройств накопления 18
1.8 Задачи проектирования 22
Выводы по разделу 23
2 Конструкторский раздел 24
2.1 Выбор компоновки автоматизации 24
2.2 Выбор промышленного робота 25
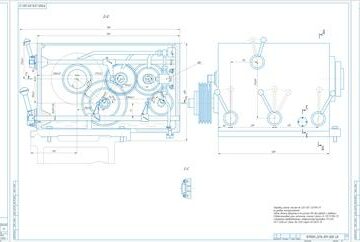
2.2.1 Описание и принцип действия ПР KR-16 27
2.2.2 Структура системы управления ПР KR-16 30
2.2.3 Система управления ПР KR-16 33
2.3 Выбор устройства накопления 35
Выводы по разделу 37
3 Описание работы устройства 38
Выводы по разделу 38
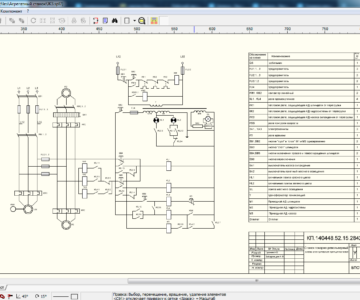
4 Структурная схема автоматизации 39
Выводы по раздел 40
5 Расчет элементов устройств 41
5.1. Расчет элементов тактового стола 41
5.1.1 Расчет и выбор привода 41
5.1.2 Выбор приводной цепи 43
5.1.3 Расчет профиля зубьев звездочек приводной роликовой цепи 44
5.1.4 Расчет сечения опор тактового стола 47
5.2 Расчет элементов ПР KR-16 49
5.2.1 Эксплуатационный расчет гидроцилиндра 49
5.2.2 Определение давления и выбор насоса 52
5.2.3 Расчет гидроцилиндра на прочность 54
Выводы по разделу 56
Заключение 57
Библиография 58
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности