ВГТУ
Информационные системы автоматизации и производства
по дисциплине Мехатронные системы технического оборудования
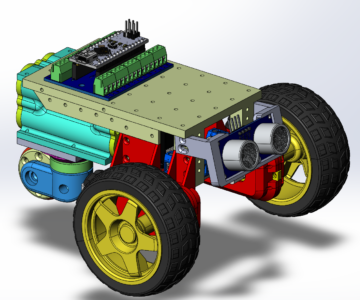
Курсовой проект на тему "Мобильная передвижная мехатронная система"
Витебск 2019
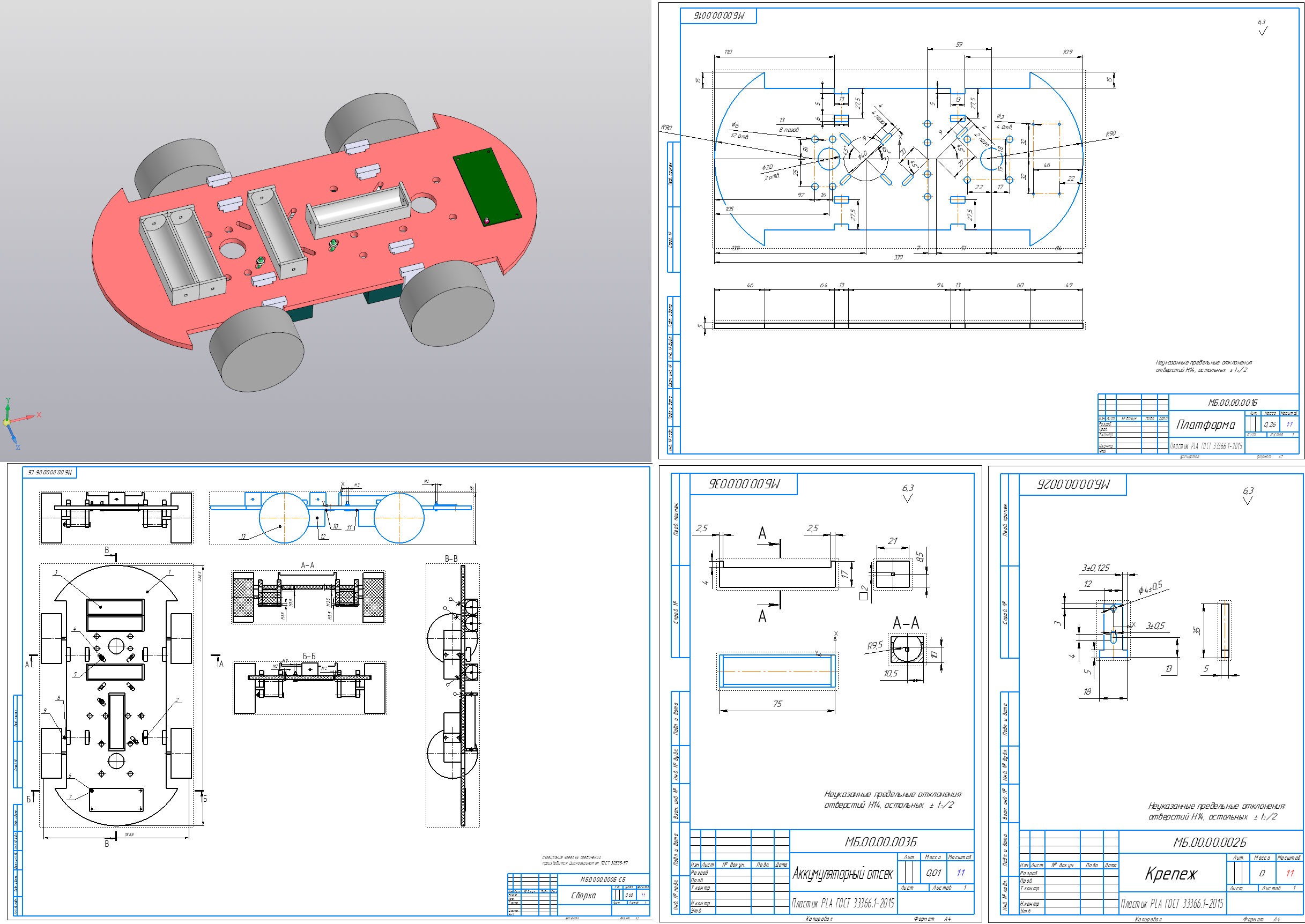
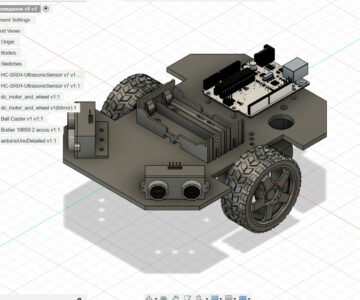
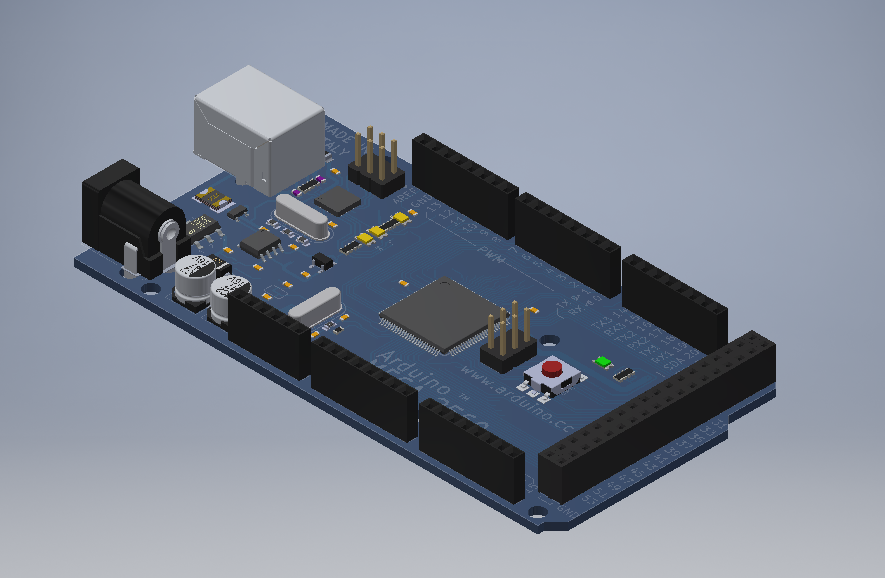
В качестве задания стоит цель разработать мобильную мехатронную систему с дистанционным инфракрасным управлением. Наиболее важными требованиями согласно исходному заданию является: возможность поворота, в том числе разворот на месте, скорость перемещения по горизонтальной поверхности равной не менее 0.05 м/с, время непрерывной работы равное одному часу и использование аккумуляторных батареи типа 18650. Менее важными требованиями являются: дальность управления равной не менее 4 метров и время инициализации равное не менее 5 секунд. Исходя из предложенных данных, можно создать плоскую платформу, которая послужит основой для всей мобильной мехатронной системы. На эту платформу можно закрепить двигатели, разместить платы управления, инфракрасный приемник и аккумуляторные отсеки. В качестве системы управления можно выбрать Arduino Nano и драйвер двигателей L298N исходя из низкого потребления тока. В качестве дистанционной инфракрасной системой управления будет использоваться инфракрасный приемник 1838b и инфракрасный пульт. Инфракрасный приемник будет расположен сверху платформы для обеспечения наилучших условий приема сигнала. Также, сверху будут расположены отсеки аккумуляторных батарей, что обеспечит удобную замену и надежность контакта клемм с аккумуляторами. Arduino Nano и драйвер двигателей L298N будут размещаться снизу платформы. Двигатели для увеличения высоты между поверхностью земли и платформой будут располагаться снизу.
Содержание расчетно-пояснительной записки (перечень вопросов, которые подлежат разработке)
Введение
1. Обзор мобильных мехатронных систем
2. Проектная часть
2.1. Проектирование платформы мехатронной системы
2.2. Проектирование системы управления
3. Расчетная часть
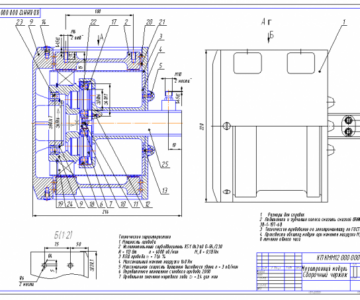
3.1. Деталировка платформы мехатронной системы
3.2. Расчет времени непрерывной автономной работы и максимальной скорости передвижения
Выводы.
Литература.
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности