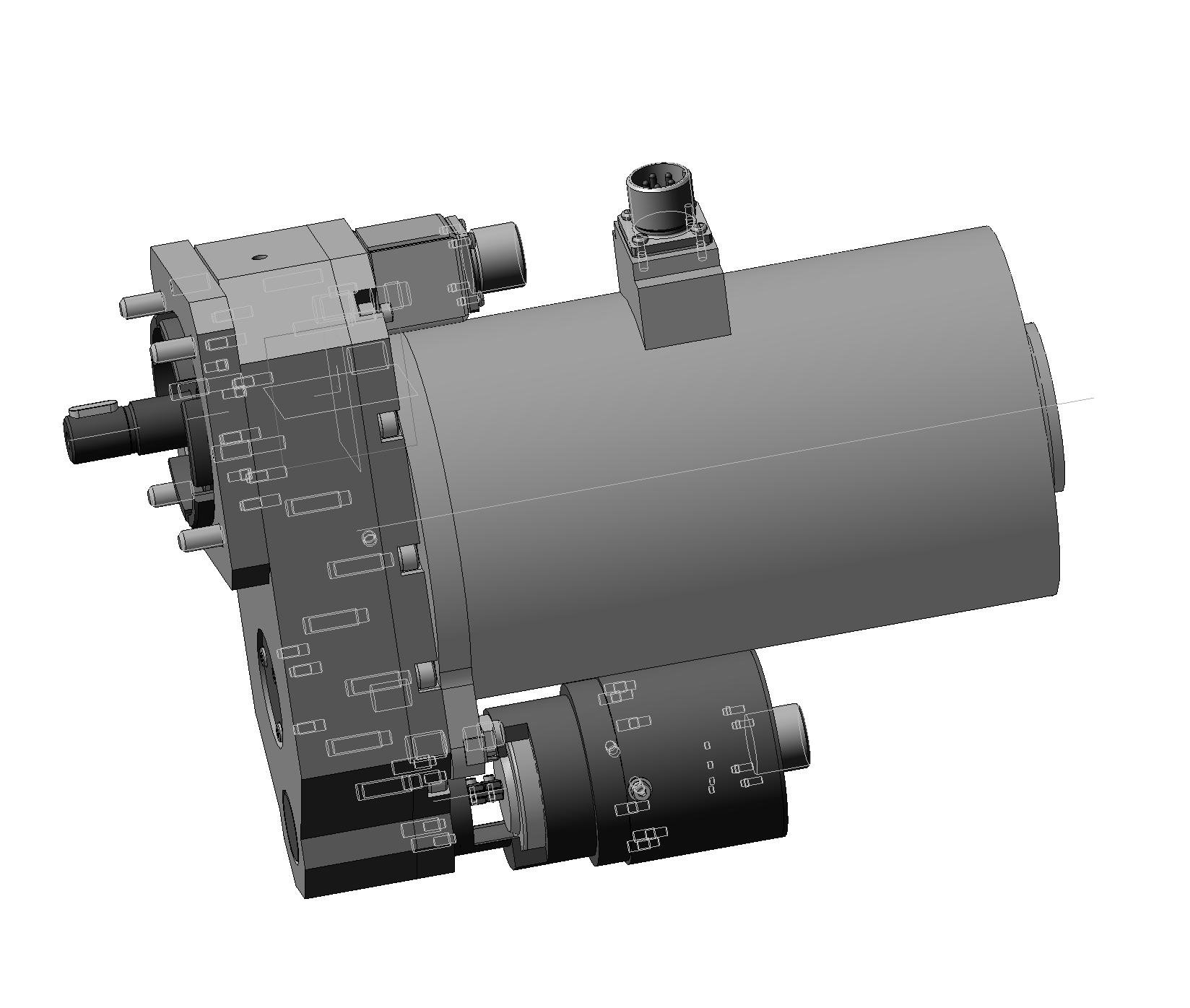
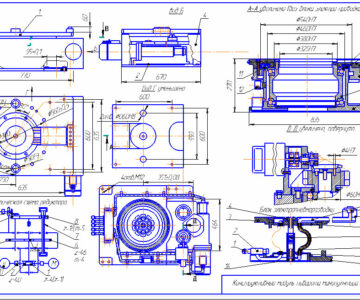
Модуль привода постоянного тока, разрабатывался для промышленного робота Универсал 15 и служил для проверки возможности, применения двигателей постоянного тока и испытания системы их управления.
Для привода модуля выдвижения головки, качания и поворота захвата, привода модуля поперечного сдвига, был выбран двигатель 4МИ 12 ФС мощностью 0,98 квт .
Для привода модулей качания руки и поворота выбран двигатель МИ-2 мощностью 2 квт.
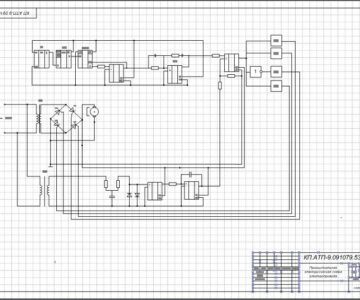
Тахогенератор СЛ121 служит для обратной связи по скорости в системе управления приводом.
Тормоз КЕВ 06.Р1.310 включается при отключении питающего напряжения 24 в постоянного тока .
Тормоз служит для удержания рабочих органов промышленного работа при отключении питающего напряжения.
Испытания показали возможность примения двигателей постоянного тока вместо гидроусилителей Г18-22.
Точность позиционирования и повторяемость улучшилась в 2 раза. Скорость около -1 м. сек.
Вес промышленного робота сократился на 500Кг.
В дальнейшем эти двигатели использовались в промышленном роботе РПМ-25.
- Главная -
- Чертежи -
- Автоматизация и управление -
- Промышленные роботы и робототехника -
- Модуль привода постоянного тока для ПР " Универсал 15" с тормозом
Модуль привода постоянного тока для ПР " Универсал 15" с тормозом
0
0
69
0
0
50
Сообщить о проблеме
Автор
Дата
23.10.2022
Язык
Русский
Состав
3D сборка и рабочие чертежи.
Софт
КОМПАС-3D 16
Как открыть?
Содержимое архива
-
Модуль привода посттока ПР универсал 15
-
Тормоз 06.Р1.320
-
Шайба пружинная.cdw
-
Корпус тормоза 06.Р1.110 _ сб.cdw
-
Диск тормозной.cdw
-
Диск тормозной _ сб.cdw
-
Тормоз 06Р1.310.cdw
-
Диск нажимной _ сб.cdw
-
Тормоз 06.Р1.320сб.a3d
-
Корпус тормоза.cdw
-
Диск нажимной.m3d
-
Корпус тормоза 06.Р1.110.m3d
-
Диск нажимной.cdw
-
Диск тормозной.m3d
-
Шайба пружинная.m3d
-
Тормоз 06.Р1.310сб.a3d
-
Корпус тормоза.m3d
-
Диск тормознойсб.a3d
-
Диск нажимной сб.a3d
-
Тормоз 06.Р1.320 _ сб.cdw
-
-
Привод 53
-
Крышка подшипника передняя.cdw
-
Стакан.cdw
-
Втулка дистанционная17х20х4.cdw
-
двигатель ми2
-
Ми2 сб.a3d
-
Двигатель МИ2.m3d
-
Вал 4МИ12.cdw
-
Ми2 сбдор.a3d
-
ми2.cdw
-
Двигатель МИ2.cdw
-
ми2.frw
-
Вал выходной ми2.m3d
-
Корпус двигателя МИ2.m3d
-
-
Прокладка 35х63.cdw
-
Вал шестерни тахогенератора2.cdw
-
Заглушка 28 _ Гост 3111-81.m3d
-
Прокладка 26х0.2х3.cdw
-
Кольцо запорное.cdw
-
ШР 28
-
втулка вилкишр28.m3d
-
РазъёмШР28.m3d
-
Крышка ШР28П4ЭШ5.cdw
-
Втулка ШР28П4ЭШ5.cdw
-
Корпус ШР28.cdw
-
контакт3.5.m3d
-
крышкавтулка вилкишр28.m3d
-
Разъём ШР.cdw
-
контакт2.5.m3d
-
вилке шр28.t3d
-
Контакт 2.5.cdw
-
Контакт 3.5.cdw
-
-
Втулка дистанционная17х20х6.5.cdw
-
Вал поразитный.cdw
-
Вал приводной сб.cdw
-
Прокладка 26х02 (2).m3d
-
Стакан сб.a3d
-
Вал выходной53сб.a3d
-
Прокладка 26х02х3.m3d
-
Привод редуктора 4МИ12 53сб..jpg
-
Плита под ми2.m3d
-
Корпус ШР20м.cdw
-
Прокладка 26х0.2.cdw
-
Двигатель 4ми12фс
-
Двигатель ми-4сб.a3d
-
Двигатель ми-4.m3d
-
Двигатель 4МИ 12ФСсб.cdw
-
Двигатель ми-4дор.a3d
-
Корпус двигателя ми-4.m3d
-
Двигатель 4ми 12 ФС_ сб.cdw
-
Шестерня 1х24cdw.m3d
-
Вал выходной 4ми.m3d
-
Шестерня 1х24.cdw
-
-
Прокладка 67х80.cdw
-
Крышка редуктора.МИ-2 53.m3d
-
Вал привода тахогенератора сб.cdw
-
Втулка дистанционная 10х5.cdw
-
Корпус редуктора.cdw
-
Кольцо дист20.m3d
-
Кронштейн шр20.m3d
-
шр20
-
Основание.m3d
-
Шр20 _ Сб.cdw
-
КорпусШР24.m3d
-
Корпусшр20.cdw
-
ПрокладкаШР20.m3d
-
контакт2.5.m3d
-
Плата .cdw
-
Крышка платы.m3d
-
РазъёмШР20.a3d
-
-
Плита переходноя 80.m3d
-
редукторМИ2сб.a3d
-
Крышка передняя.m3d
-
Фиксатор тахогенератора.cdw
-
Крышка подшипника поразитной передачи.m3d
-
Кольцо дистанционное 26х2.cdw
-
Шестерня тахогенератора.cdw
-
Втулка дистанционная 17х20х7m3d.m3d
-
Втулка дистанционная 10х5.m3d
-
Втулка дистанционная 17х20х4.m3d
-
Втулка 14х8.m3d
-
Крышка редуктора.4МИ12 53.m3d
-
Вал выходный.cdw
-
Плита двигателя МИ2.cdw
-
Колесо зубчатое 1х82х17.cdw
-
Вал шестерни тахогенератора2.m3d
-
Колесо зубчатое 1х82х17.m3d
-
Кольцо пружинное 26.m3d
-
Шестерня 1х24МИ2.cdw
-
Привод МИ2 _ сб.cdw
-
Вал привода тахогенератора _ У-015-01-012-04сб.cdw
-
Крышка редуктора4МИ1253.cdw
-
Привод 4МИ12-53_ сб.cdw
-
Корпус редуктора53.m3d
-
Прокладка 26х02.m3d
-
Заглушка 28 _ Гост 3111-81.cdw
-
Плита переходная 80-53правая.cdw
-
Плита переходноя 80прав.m3d
-
Проставок тахогенератора.m3d
-
Стакансб .cdw
-
Вал паразитный.m3d
-
Вал выходной.m3d
-
Кронштейн ШР20.cdw
-
Пояснительная записка.kdw
-
Привод редуктора 4МИ12 53сб..a3d
-
Шестерня 1х24cdw.m3d
-
Колесо зубчатое поразитное _.cdw
-
Вал привода тахогенератора сб.a3d
-
Крышка подшипника.cdw
-
Прокладка 35х63х0.2.m3d
-
Проставок тахогенератора.cdw
-
24х82х1 х2.fp3
-
Плита переходноя 80лев.m3d
-
тахогенератор сл 161
-
Муфта тахогенератора
-
Полумуфта 4.cdw
-
Поумуфтавед4.m3d
-
Поумуфта4.m3d
-
Полумуфта вед4.cdw
-
-
СЛ121корпус.m3d
-
Вал выходной сл161.m3d
-
сл121сб.a3d
-
СЛ121 р_ сб.cdw
-
СЛ121.pdf
-
-
Дно стакана.m3d
-
24х82х1 х5.fp3
-
Колесо зубчатое паразитноесб.a3d
-
Стакан.m3d
-
Кольцо дистанционное 20.cdw
-
Фиксатор тахогенератора.m3d
-
Прокладка 67х80.m3d
-
Дно стакана.cdw
-
Плита переходноя 80.cdw
-
Вал шестерни тахогенератора.cdw
-
Втулка14х8.cdw
-
Шестерня 1х24.аcdw.cdw
-
Шестерня 1х24МИ2.m3d
-
Крышка редуктора МИ253.cdw
-
Шестерня 1х24.cdw
-
1х24х82.gear_exc_dat
-
Вал шестерни тахогенератора.m3d
-
Плита переходноя 80.- 53левая.cdw
-
Кольцо дистанционное 26х2cdw.m3d
-
Шестерня тахогенератора.m3d
-
Кожухшр20м..m3d
-
-
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:
Комментариев пока нет
Чтобы оставить комментарий, необходимо войти
Войти с помощью:
Ссылка на логин через google
Ссылка на логин через vk
Ссылка на логин через yandex