Национальный университет "Львовская политехника"
Кафедра Механики и автоматизации машиностроения
Курсовой проект по дисциплине "Информационные устройства робототехничиских систем"
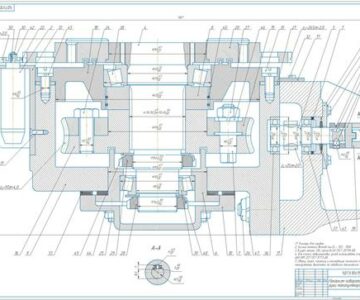
На тему "Разработка системы управления механизмом выдвижения руки манипулятора"
Львов 2017
Исходные данные:
тип привода - пневмопривод (пневмоцилиндр)
максимальной ход приводу 324 мм
точность позиционирования ± 0,5 мм
система управления должна обеспечивать перемещение на 2-х фиксированных скоростях:
V1 - 100% максимальной скорости
V2 - 30% максимальной скорости
система управления должна обеспечивать плавное нарастание скорости и торможения. Остановка осуществляется только с минимальной скорости
В данной роботе рассматривается выбор контроллера и его составляющих, расчет потребляемой мощности, выбор блока питания
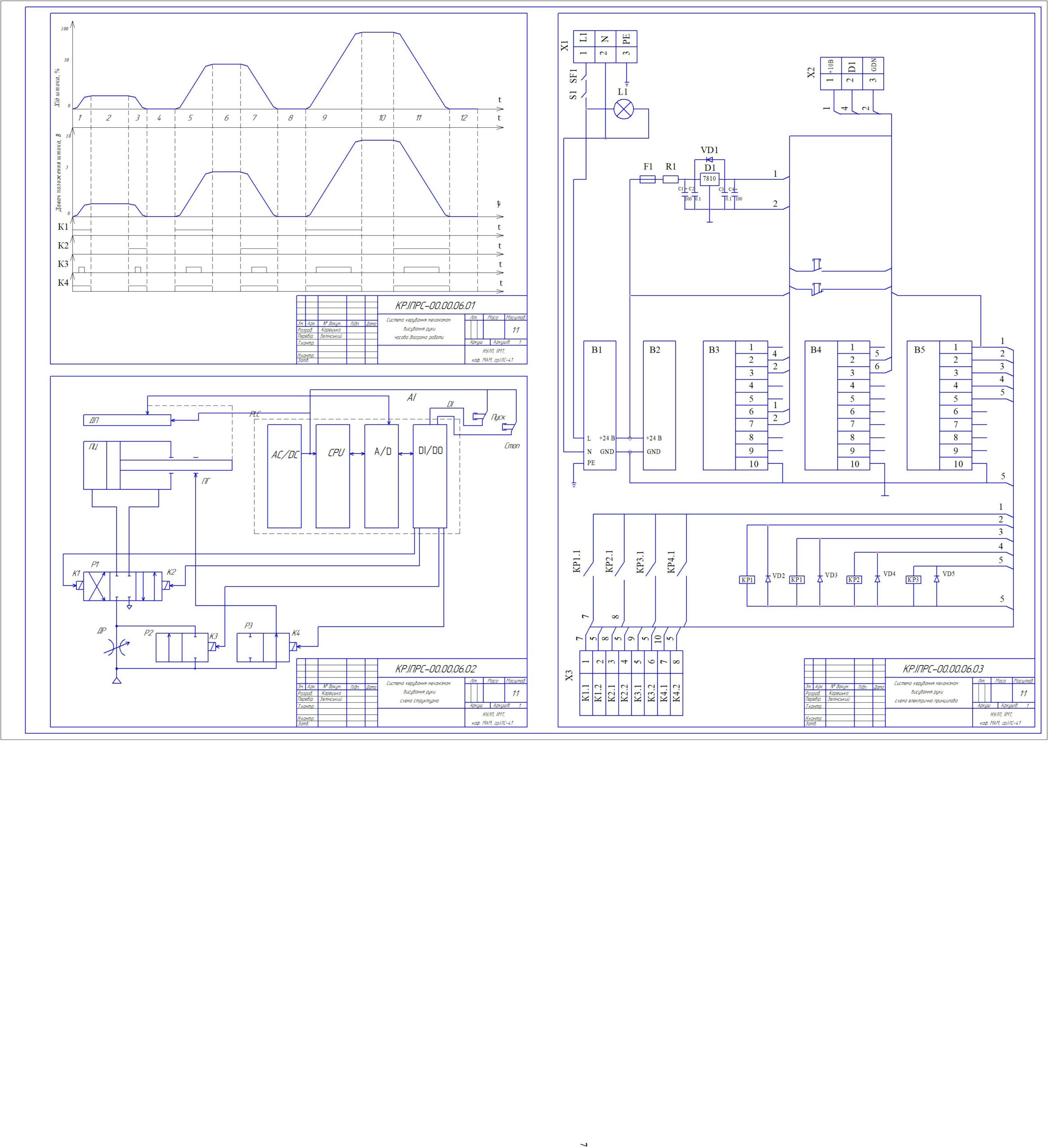
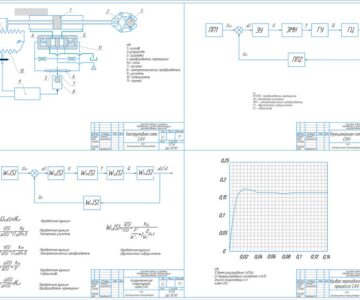
Графическая часть содержит схему електрической-принципиальной схемы
1 Завдання 3
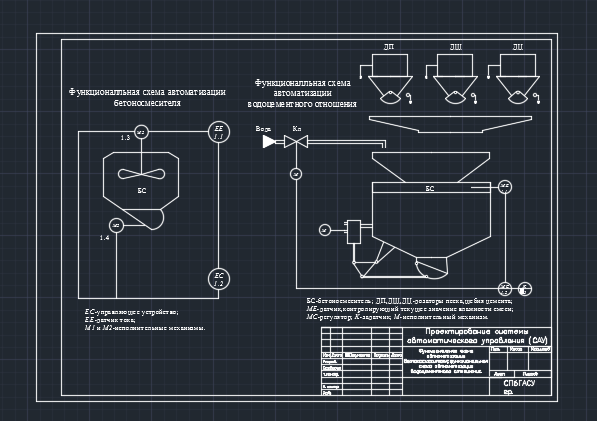
2 Розробка структурної схеми 4
2.1 Аналіз варіантів та побудова структурної схеми 4
2.2 Часова діаграма роботи приводу та системи керування 8
2.3 Розрахунок розрядності аналого-цифрового перетворювача 9
3 Розробка схеми електричної-принципової 9
3.1 Вибір контролера 10
3.2 Процесорний модуль типу 214-1BA03 12
3.3 Модуль аналогових входів 4x12 біт типу 231-1BD40 14
3.4 Модуль дискретних входів типу 221-1FF30 15
3.5 Модуль дискретних виходів 18
3.6 Розрахунок споживаної потужності, вибір блока живлення 20
3.7 Розрахунок інших елементів 20
4 Висновок: 22
5 Література 22
6 Додатки 24



Архив не открывается
читайте
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности