Назарбаев Университет / Nazarbayev University
Школа Инженерии и Цифровых наук / School of Engineering and Digital Sciences (SEDS)
Робототехника / Robotics Engineering
Лабораторный проект по дисциплине "Механический дизайн с CAD"
Тема: Проектирование роботизированного захвата для манипулятора
Астана, 2025
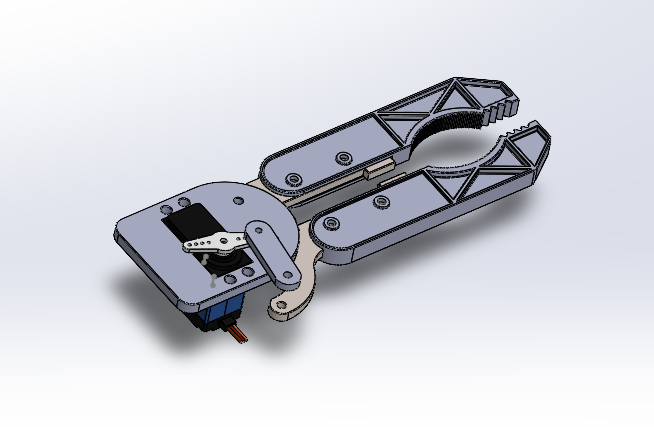
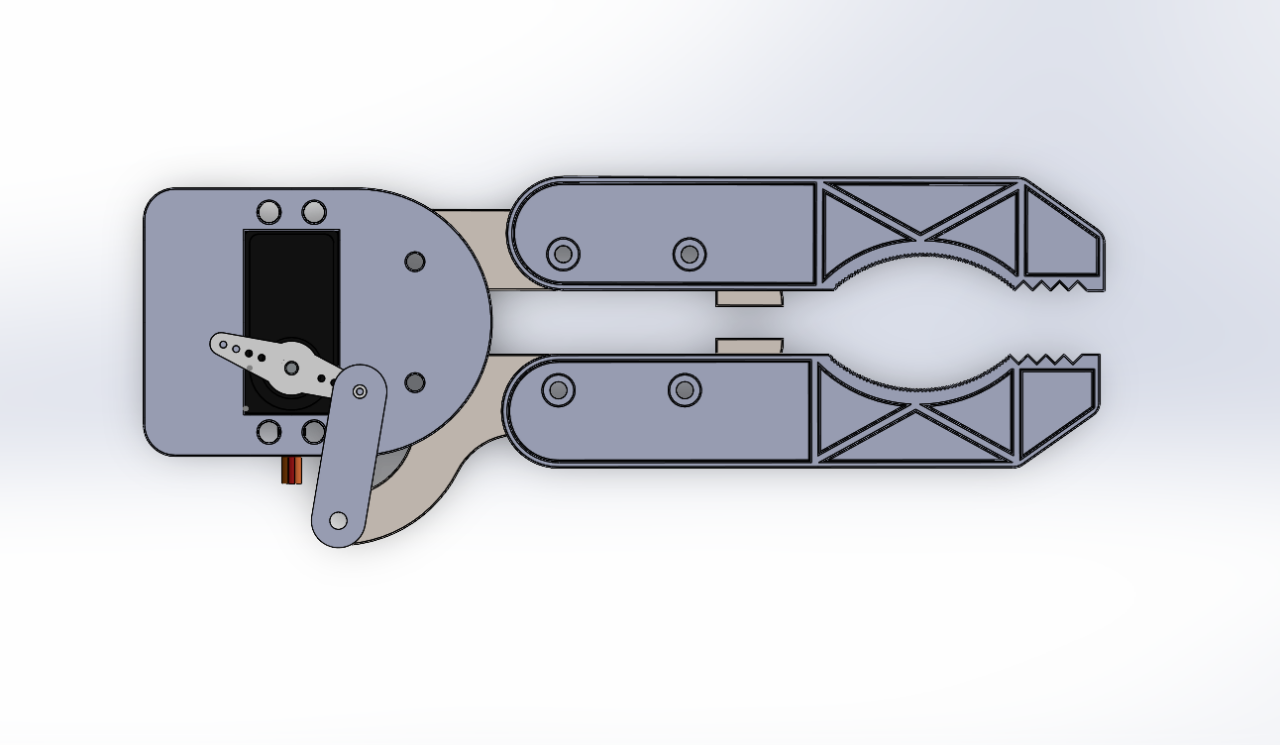
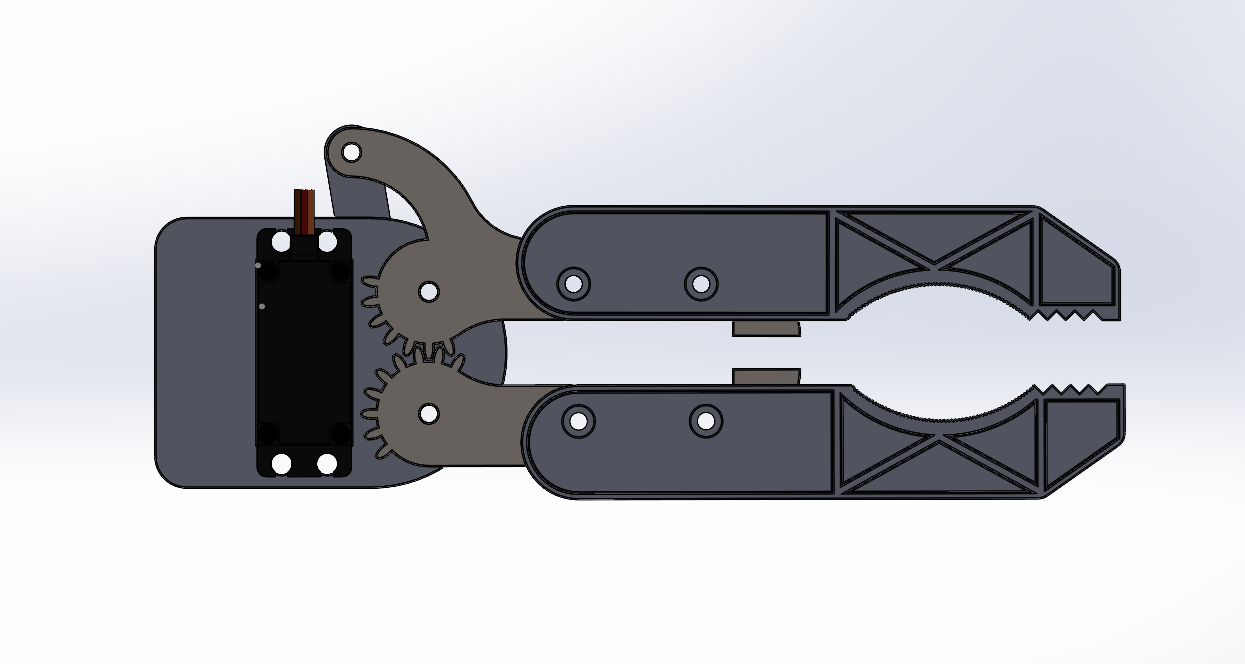
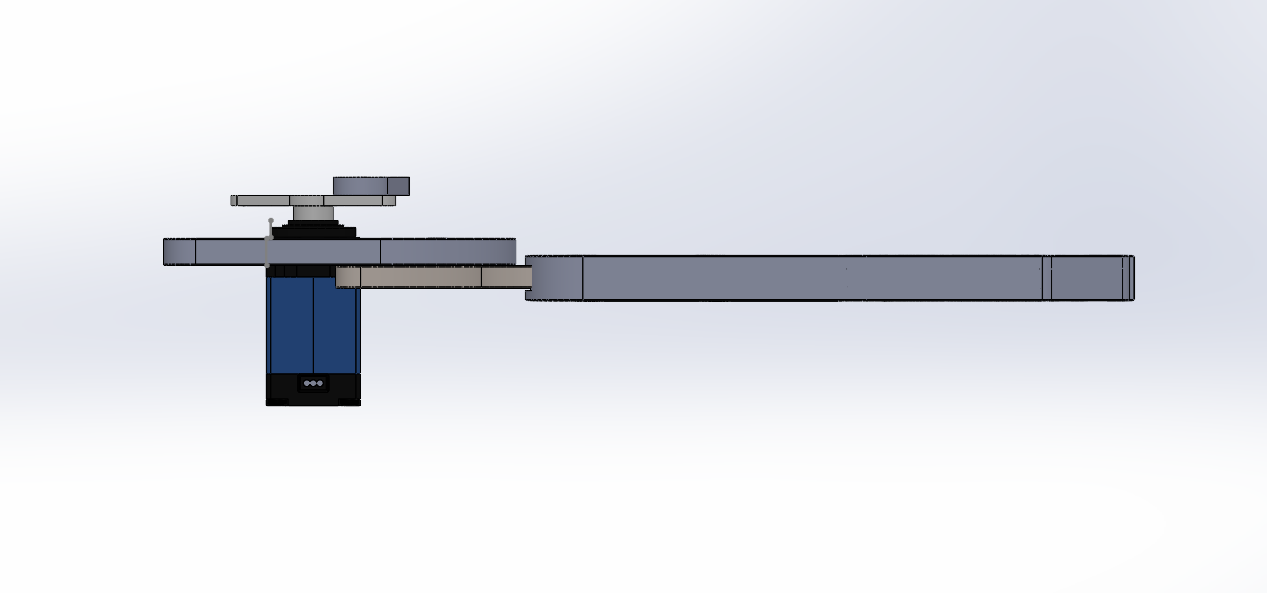
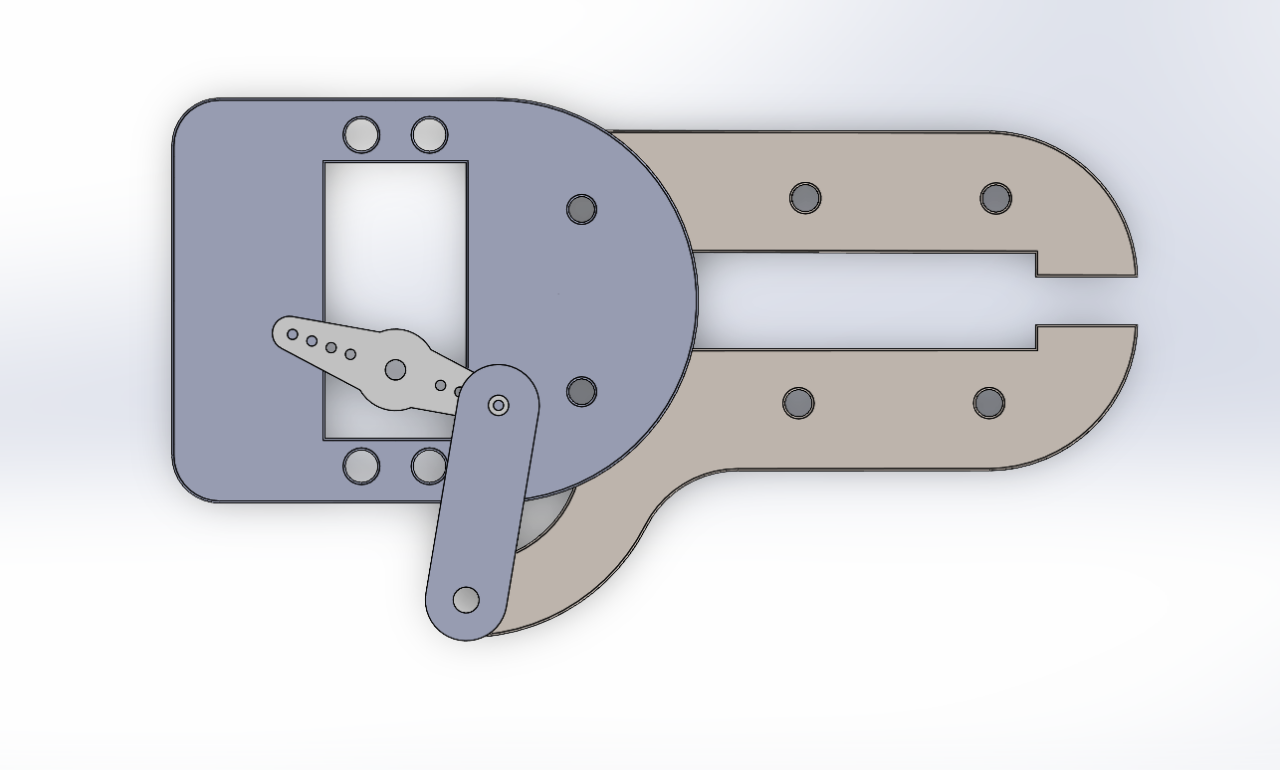
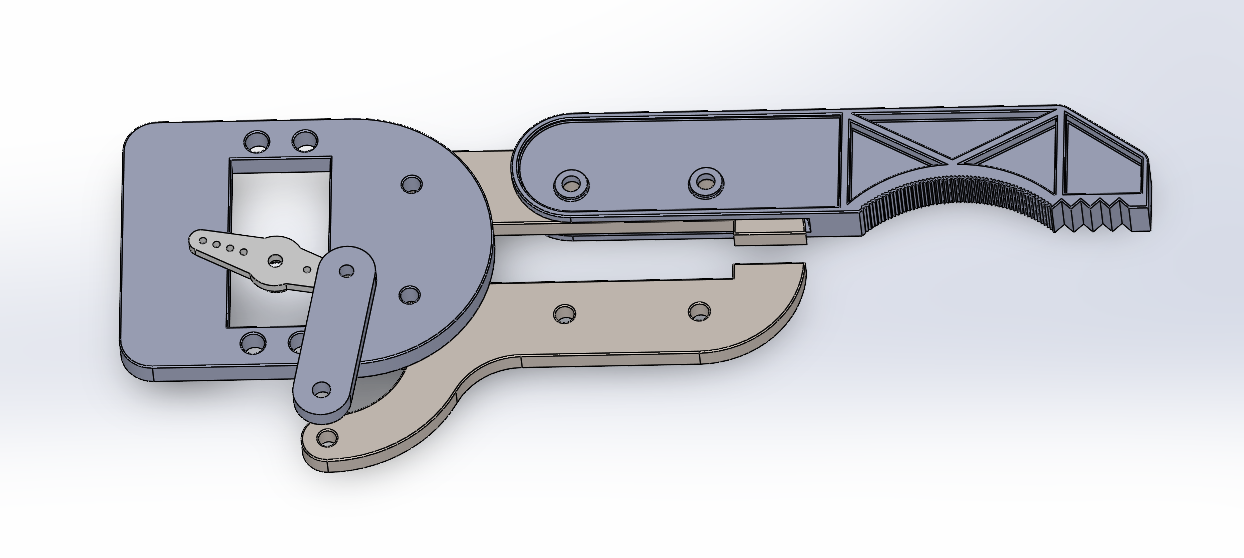
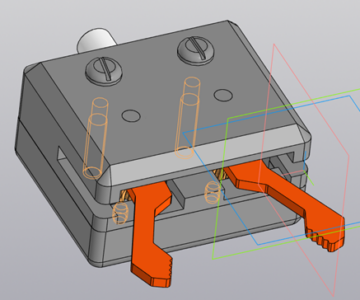
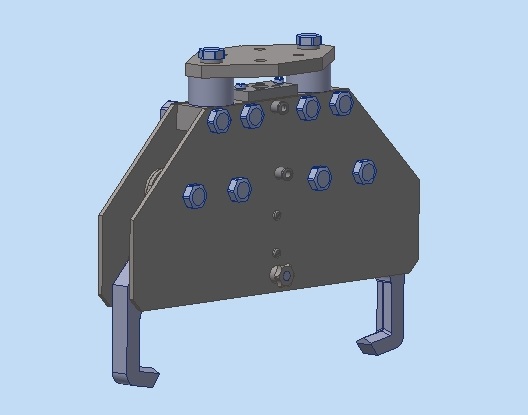
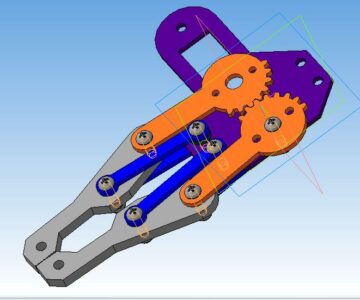
Разработана 3D-модель двухпальцевого роботизированного захвата (грейфера/гриппера) с параллельным сведением клешней для учебных/проектных манипуляторов. Привод - микросерво типа SG90/MG90S (или аналог) через рычажно-зубчатый механизм, обеспечивающий синхронное движение обоих клешней. Рабочая часть выполнена с облегчением (ребра/решетка) и насечками на контактных поверхностях для удержания деталей.
Размеры модели рассчитаны под типоразмер микросерво и стандартный крепеж М3, остальные габариты подобраны под изготовление на FDM-печати (слой 0.2–0.28 мм, сопло 0.4 мм) или фрезеровку пластика/алюминия (по необходимости).
Технические характеристики: ход раскрытия клешней: ~[XX] мм; максимальный диаметр/ширина объекта: ~40-60 мм; масса сборки: ~150-200 г; рекомендуемая нагрузка: до ~500 г; угол поворота серво: 180°.
В конструкторской части выполнены: моделирование деталей и сборки, подготовка файлов для производства/печати.






Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности