Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Московский государственный технический университет
имени Н.Э. Баумана
(национальный исследовательский университет)»
(МГТУ им. Н.Э. Баумана)
ФАКУЛЬТЕТ «Специальное машиностроение»
КАФЕДРА «Робототехнические системы и мехатроника»
Курсовой проект на тему:
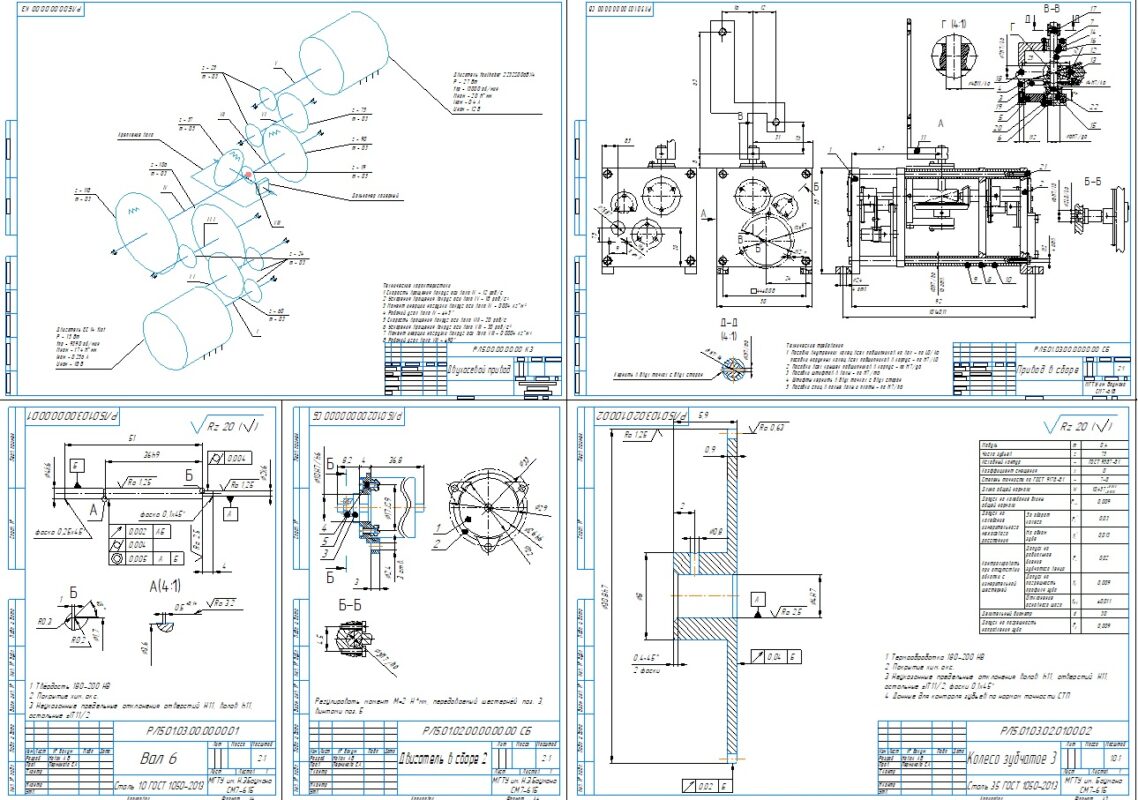
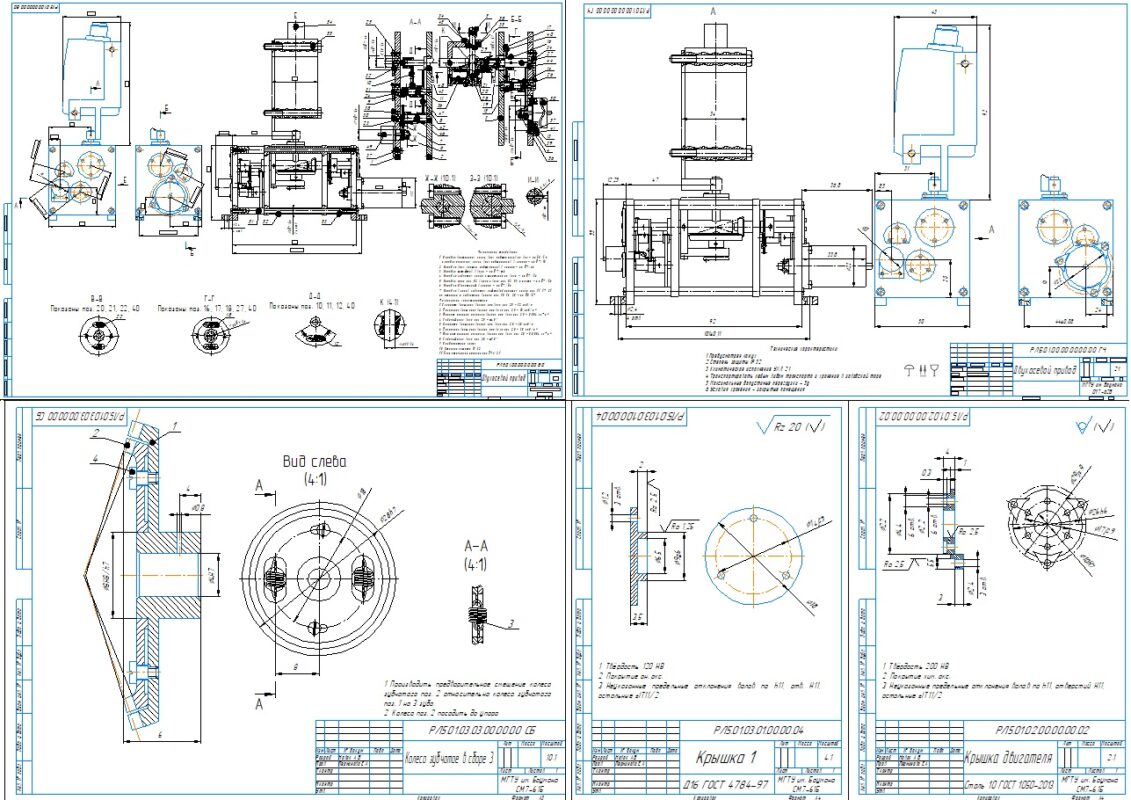
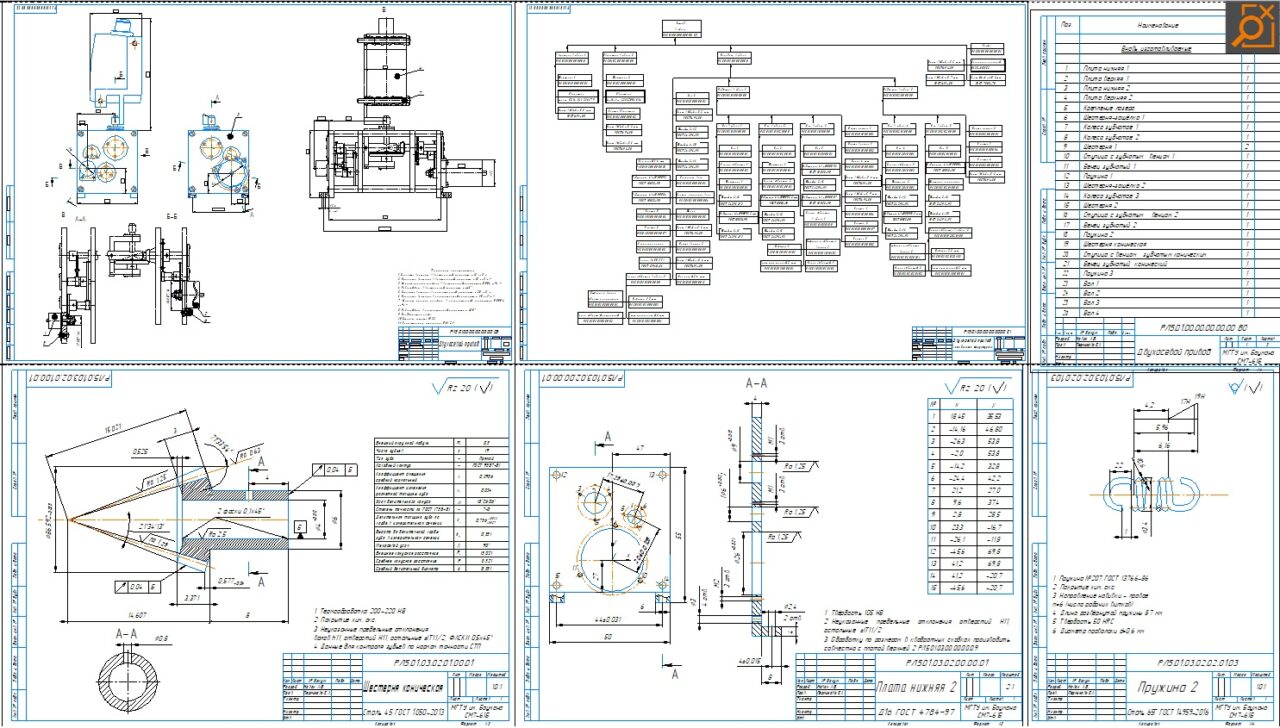
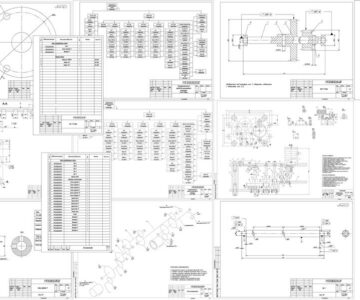
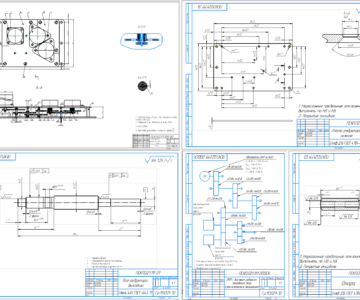
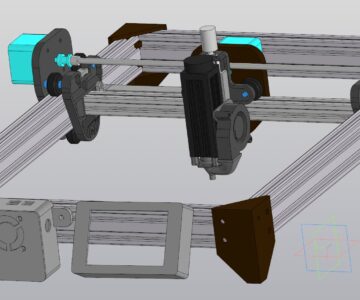
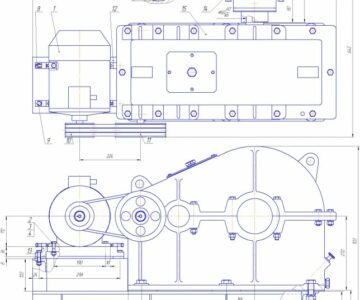
«Двухосевой привод для лазерного трекера»
2021г.
Исходные данные
Параметры
Номинальный момент Mст, Н*мм 0,5
Скорость вращения выходного вала ω, рад/сек 42
Ускорение вращения выходного вала ε, рад/сек2 30
Момент инерции нагрузки Jн, кгм2. 0,0004
Угол поворота выходного вала φ, град ±90°
Присоединительный размер d , мм 20
Угол отработки на выходном валу ∆φ, угл. мин. 15
Критерий проектирования Минимизация погрешности
Тип предохранительной муфты Фрикционная (для предохранения от прокручивания руками, при упоре в ограничитель)/ Люфтовыбирающее колесо (для минимизации погрешности)
Тип датчика угла Датчик Холла
Тип двигателя Бесколлекторный постоянного тока
Условия эксплуатации УХЛ 2
Степень защиты IP 32
Оглавление
Исходные данные 5
Выбор двигателя 6
Кинематический расчёт 8
Разбиение общего передаточного отношения по ступеням 9
Число зубьев шестерен и колёс. 9
Силовой расчет ЭМП. 10
Выбор материала 11
Расчет зубчатых передач на изгибную прочность 12
Геометрический расчет кинематики ЭМП 14
Проверочные расчеты 16
Точностный расчет разрабатываемой кинематики 16
Определение кинематической погрешности 16
Определение кинематической погрешности цепи методом максимума-минимума 18
Расчет погрешностей мертвого хода 18
Погрешность мертвого хода цепи 20
Расчет суммарной погрешности 20
Расчёт люфтовыбирающего цилиндрического колеса 4 20
Расчёт люфтовыбирающего конического колеса 6 22
Уточненный силовой расчет и проверка правильности выбора электродвигателя 23
Проверочные расчеты на прочность 26
Проверка прочности зубьев на контактную и изгибную прочность. 26
Расчет на быстродействие 26
Расчет вала 27
Предварительный расчет на прочность по крутильному моменту. 27
Расчет на крутильную жесткость 27
Выбор опор для вала 28
Литература 28



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности